Chapter 20. Asynchronous Programming
Suppose you’re writing a chat server. For each network connection, there are incoming packets to parse, outgoing packets to assemble, security parameters to manage, chat group subscriptions to track, and so on. Managing all this for many connections simultaneously is going to take some organization.
Ideally, you could just start a separate thread for each incoming connection:
usestd::{net,thread};letlistener=net::TcpListener::bind(address)?;forsocket_resultinlistener.incoming(){letsocket=socket_result?;letgroups=chat_group_table.clone();thread::spawn(||{log_error(serve(socket,groups));});}
For each new connection, this spawns a fresh thread running the serve function, which is able to focus on managing a single connection’s needs.
This works well, until everything goes much better than planned and suddenly you have tens of thousands of users. It’s not unusual for a thread’s stack to grow to 100 KiB or more, and that is probably not how you want to spend gigabytes of server memory. Threads are good and necessary for distributing work across multiple processors, but their memory demands are such that we often need complementary ways, used together with threads, to break the work down.
You can use Rust asynchronous tasks to interleave many independent activities on a single thread or a pool of worker threads. Asynchronous tasks are similar to threads, but are much quicker to create, pass control amongst themselves more efficiently, and have memory overhead an order of magnitude less than that of a thread. It is perfectly feasible to have hundreds of thousands of asynchronous tasks running simultaneously in a single program. Of course, your application may still be limited by other factors like network bandwidth, database speed, computation, or the work’s inherent memory requirements, but the memory overhead inherent in the use of tasks is much less significant than that of threads.
Generally, asynchronous Rust code looks very much like ordinary multithreaded code, except that operations that might block, like I/O or acquiring mutexes, need to be handled a bit differently. Treating these specially gives Rust more information about how your code will behave, which is what makes the improved performance possible. The asynchronous version of the previous code looks like this:
useasync_std::{net,task};letlistener=net::TcpListener::bind(address).await?;letmutnew_connections=listener.incoming();whileletSome(socket_result)=new_connections.next().await{letsocket=socket_result?;letgroups=chat_group_table.clone();task::spawn(async{log_error(serve(socket,groups).await);});}
This uses the async_std crate’s networking and task modules and adds .await after the calls that may block. But the overall structure is the same as the thread-based version.
The goal of this chapter is not only to help you write asynchronous code, but also to show how it works in enough detail that you can anticipate how it will perform in your applications and see where it can be most valuable.
-
To show the mechanics of asynchronous programming, we lay out a minimal set of language features that covers all the core concepts: futures, asynchronous functions,
awaitexpressions, tasks, and theblock_onandspawn_localexecutors. -
Then we present asynchronous blocks and the
spawnexecutor. These are essential to getting real work done, but conceptually, they’re just variants on the features we just mentioned. In the process, we point out a few issues you’re likely to encounter that are unique to asynchronous programming and explain how to handle them. -
To show all these pieces working together, we walk through the complete code for a chat server and client, of which the preceding code fragment is a part.
-
To illustrate how primitive futures and executors work, we present simple but functional implementations of
spawn_blockingandblock_on. -
Finally, we explain the
Pintype, which appears from time to time in asynchronous interfaces to ensure that asynchronous function and block futures are used safely.
From Synchronous to Asynchronous
Consider what happens when you call the following (not async, completely traditional) function:
usestd::io::prelude::*;usestd::net;fncheapo_request(host:&str,port:u16,path:&str)->std::io::Result<String>{letmutsocket=net::TcpStream::connect((host,port))?;letrequest=format!("GET {} HTTP/1.1\r\nHost: {}\r\n\r\n",path,host);socket.write_all(request.as_bytes())?;socket.shutdown(net::Shutdown::Write)?;letmutresponse=String::new();socket.read_to_string(&mutresponse)?;Ok(response)}
This opens a TCP connection to a web server, sends it a bare-bones HTTP request in an outdated protocol,1 and then reads the response. Figure 20-1 shows this function’s execution over time.
This diagram shows how the function call stack behaves as time runs from left to right. Each function call is a box, placed atop its caller. Obviously, the cheapo_request function runs throughout the entire execution. It calls functions from the Rust standard library like TcpStream::connect and TcpStream’s implementations of write_all and read_to_string. These call other functions in turn, but eventually the program makes system calls, requests to the operating system to actually get something done, like open a TCP connection, or read or write some data.
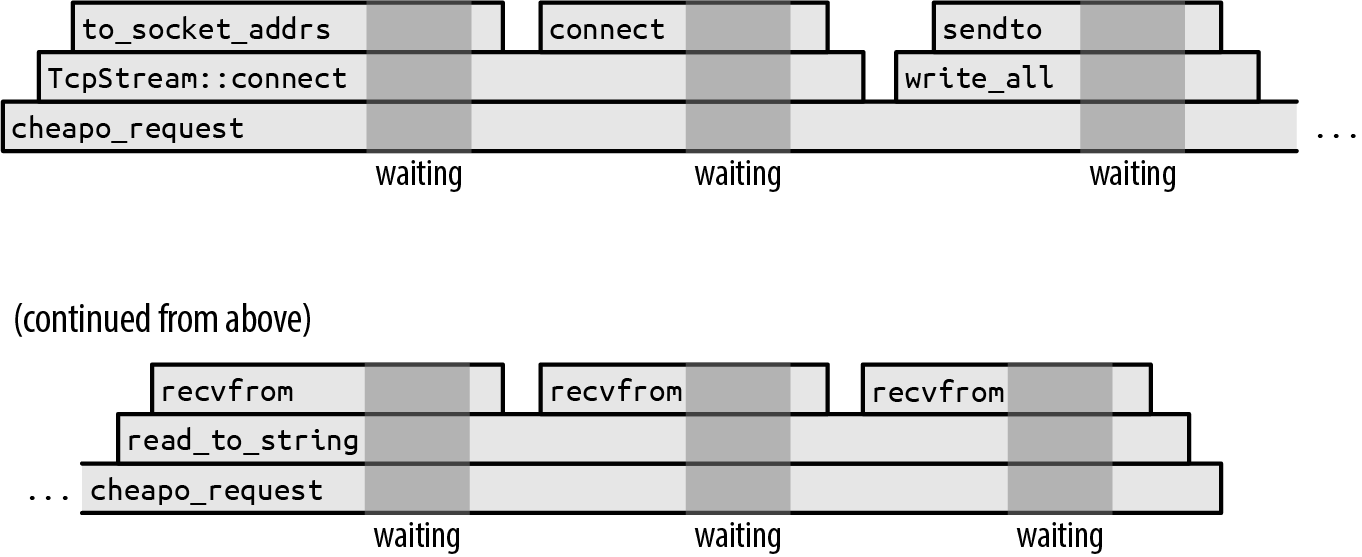
Figure 20-1. Progress of a synchronous HTTP request (darker gray areas are waiting for the operating system)
The darker gray backgrounds mark the times when the program is waiting for the operating system to finish the system call. We didn’t draw these times to scale. If we had, the entire diagram would be darker gray: in practice, this function spends almost all of its time waiting for the operating system. The execution of the preceding code would be narrow slivers between the system calls.
While this function is waiting for the system calls to return, its single thread is blocked: it can’t do anything else until the system call finishes. It’s not unusual for a thread’s stack to be tens or hundreds of kilobytes in size, so if this were a fragment of some larger system, with many threads working away at similar jobs, locking down those threads’ resources to do nothing but wait could become quite expensive.
To get around this, a thread needs to be able to take up other work while it waits for system calls to complete. But it’s not obvious how to accomplish this. For example, the signature of the function we’re using to read the response from the socket is:
fnread_to_string(&mutself,buf:&mutString)->std::io::Result<usize>;
It’s written right into the type: this function doesn’t return until the job is done, or something goes wrong. This function is synchronous: the caller resumes when the operation is complete. If we want to use our thread for other things while the operating system does its work, we’re going need a new I/O library that provides an asynchronous version of this function.
Futures
Rust’s approach to supporting asynchronous operations is to introduce a trait, std::future::Future:
traitFuture{typeOutput;// For now, read `Pin<&mut Self>` as `&mut Self`.fnpoll(self:Pin<&mutSelf>,cx:&mutContext<'_>)->Poll<Self::Output>;}enumPoll<T>{Ready(T),Pending,}
A Future represents an operation that you can test for completion. A future’s poll method never waits for the operation to finish: it always returns immediately. If the operation is complete, poll returns Poll::Ready(output), where output is its final result. Otherwise, it returns Pending. If and when the future is worth polling again, it promises to let us know by invoking a waker, a callback function supplied in the Context. We call this the “piñata model” of asynchronous programming: the only thing you can do with a future is whack it with a poll until a value falls out.
All modern operating systems include variants of their system calls that we can use to implement this sort of polling interface. On Unix and Windows, for example, if you put a network socket in nonblocking mode, then reads and writes return an error if they would block; you have to try again later.
So an asynchronous version of read_to_string would have a signature roughly like this:
fnread_to_string(&mutself,buf:&mutString)->implFuture<Output=Result<usize>>;
This is the same as the signature we showed earlier, except for the return type: the asynchronous version returns a future of a Result<usize>. You’ll need to poll this future until you get a Ready(result) from it. Each time it’s polled, the read proceeds as far as it can. The final result gives you the success value or an error value, just like an ordinary I/O operation. This is the general pattern: the asynchronous version of any function takes the same arguments as the synchronous version, but the return type has a Future wrapped around it.
Calling this version of read_to_string doesn’t actually read anything; its sole responsibility is to construct and return a future that will do the real work when polled. This future must hold all the information necessary to carry out the request made by the call. For example, the future returned by this read_to_string must remember the input stream it was called on, and the String to which it should append the incoming data. In fact, since the future holds the references self and buf, the proper signature for read_to_string must be:
fnread_to_string<'a>(&'amutself,buf:&'amutString)->implFuture<Output=Result<usize>>+'a;
This adds lifetimes to indicate that the future returned can live only as long as the values that self and buf are borrowing.
The async-std crate provides asynchronous versions of all of std’s I/O facilities, including an asynchronous Read trait with a read_to_string method. async-std closely follows the design of std, reusing std’s types in its own interfaces whenever possible, so errors, results, network addresses, and most of the other associated data are compatible between the two worlds. Familiarity with std helps you use async-std, and vice versa.
One of the rules of the Future trait is that, once a future has returned Poll::Ready, it may assume it will never be polled again. Some futures just return Poll::Pending forever if they are overpolled; others may panic or hang. (They must not, however, violate memory or thread safety, or otherwise cause undefined behavior.) The fuse adaptor method on the Future trait turns any future into one that simply returns Poll::Pending forever. But all the usual ways of consuming futures respect this rule, so fuse is usually not necessary.
If polling sounds inefficient, don’t worry. Rust’s asynchronous architecture is carefully designed so that, as long as your basic I/O functions like read_to_string are implemented correctly, you’ll only poll a future when it’s worthwhile. Every time poll is called, something somewhere should return Ready, or at least make progress toward that goal. We’ll explain how this works in “Primitive Futures and Executors: When Is a Future Worth Polling Again?”.
But using futures seems like a challenge: when you poll, what should you do when you get Poll::Pending? You’ll have to scrounge around for some other work this thread can do for the time being, without forgetting to come back to this future later and poll it again. Your entire program will be overgrown with plumbing keeping track of who’s pending and what should be done once they’re ready. The simplicity of our cheapo_request function is ruined.
Async Functions and Await Expressions
Here’s a version of cheapo_request written as an asynchronous function:
useasync_std::io::prelude::*;useasync_std::net;asyncfncheapo_request(host:&str,port:u16,path:&str)->std::io::Result<String>{letmutsocket=net::TcpStream::connect((host,port)).await?;letrequest=format!("GET {} HTTP/1.1\r\nHost: {}\r\n\r\n",path,host);socket.write_all(request.as_bytes()).await?;socket.shutdown(net::Shutdown::Write)?;letmutresponse=String::new();socket.read_to_string(&mutresponse).await?;Ok(response)}
This is token for token the same as our original version, except:
-
The function starts with
async fninstead offn. -
It uses the
async_stdcrate’s asynchronous versions ofTcpStream::connect,write_all, andread_to_string. These all return futures of their results. (The examples in this section use version1.7ofasync_std.) -
After each call that returns a future, the code says
.await. Although this looks like a reference to a struct field namedawait, it is actually special syntax built into the language for waiting until a future is ready. Anawaitexpression evaluates to the final value of the future. This is how the function obtains the results fromconnect,write_all, andread_to_string.
Unlike an ordinary function, when you call an asynchronous function, it returns immediately, before the body begins execution at all. Obviously, the call’s final return value hasn’t been computed yet; what you get is a future of its final value. So if you execute this code:
letresponse=cheapo_request(host,port,path);
then response will be a future of a std::io::Result<String>, and the body of cheapo_request has not yet begun execution. You don’t need to adjust an asynchronous function’s return type; Rust automatically treats async fn f(...) -> T as a function that returns a future of a T, not a T directly.
The future returned by an async function wraps up all the information the function body will need to run: the function’s arguments, space for its local variables, and so on. (It’s as if you’d captured the call’s stack frame as an ordinary Rust value.) So response must hold the values passed for host, port, and path, since cheapo_request’s body is going to need those to run.
The future’s specific type is generated automatically by the compiler, based on the function’s body and arguments. This type doesn’t have a name; all you know about it is that it implements Future<Output=R>, where R is the async function’s return type. In this sense, futures of asynchronous functions are like closures: closures also have anonymous types, generated by the compiler, that implement the FnOnce, Fn, and FnMut traits.
When you first poll the future returned by cheapo_request, execution begins at the top of the function body and runs until the first await of the future returned by TcpStream::connect. The await expression polls the connect future, and if it is not ready, then it returns Poll::Pending to its own caller: polling cheapo_request’s future cannot proceed past that first await until a poll of TcpStream::connect’s future returns Poll::Ready. So a rough equivalent of the expression TcpStream::connect(...).await might be:
{// Note: this is pseudocode, not valid Rustletconnect_future=TcpStream::connect(...);'retry_point:matchconnect_future.poll(cx){Poll::Ready(value)=>value,Poll::Pending=>{// Arrange for the next `poll` of `cheapo_request`'s// future to resume execution at 'retry_point....returnPoll::Pending;}}}
An await expression takes ownership of the future and then polls it. If it’s ready, then the future’s final value is the value of the await expression, and execution continues. Otherwise, it returns the Poll::Pending to its own caller.
But crucially, the next poll of cheapo_request’s future doesn’t start at the top of the function again: instead, it resumes execution mid-function at the point where it is about to poll connect_future. We don’t progress to the rest of the async function until that future is ready.
As cheapo_request’s future continues to be polled, it will work its way through the function body from one await to the next, moving on only when the subfuture it’s awaiting is ready. Thus, how many times cheapo_request’s future must be polled depends on both the behavior of the subfutures and the function’s own control flow. cheapo_request’s future tracks the point at which the next poll should resume, and all the local state—variables, arguments, temporaries—that resumption will need.
The ability to suspend execution mid-function and then resume later is unique to async functions. When an ordinary function returns, its stack frame is gone for good. Since await expressions depend on the ability to resume, you can only use them inside async functions.
As of this writing, Rust does not yet allow traits to have asynchronous methods. Only free functions and functions inherent to a specific type can be asynchronous. Lifting this restriction will require a number of changes to the language. In the meantime, if you need to define traits that include async functions, consider using the async-trait crate, which provides a macro-based workaround.
Calling Async Functions from Synchronous Code: block_on
In a sense, async functions just pass the buck. True, it’s easy to get a future’s value in an async function: just await it. But the async function itself returns a future, so it’s now the caller’s job to do the polling somehow. Ultimately, someone has to actually wait for a value.
We can call cheapo_request from an ordinary, synchronous function (like main, for example) using async_std’s task::block_on function, which takes a future and polls it until it produces a value:
fnmain()->std::io::Result<()>{useasync_std::task;letresponse=task::block_on(cheapo_request("example.com",80,"/"))?;println!("{}",response);Ok(())}
Since block_on is a synchronous function that produces the final value of an asynchronous function, you can think of it as an adapter from the asynchronous world to the synchronous world. But its blocking character also means that you should never use block_on within an async function: it would block the entire thread until the value is ready. Use await instead.
Figure 20-2 shows one possible execution of main.
The upper timeline, “Simplified view,” shows an abstracted view of the program’s asynchronous calls: cheapo_request first calls TcpStream::connect to obtain a socket and then calls write_all and read_to_string on that socket. Then it returns. This is very similar to the timeline for the synchronous version of cheapo_request earlier in this chapter.
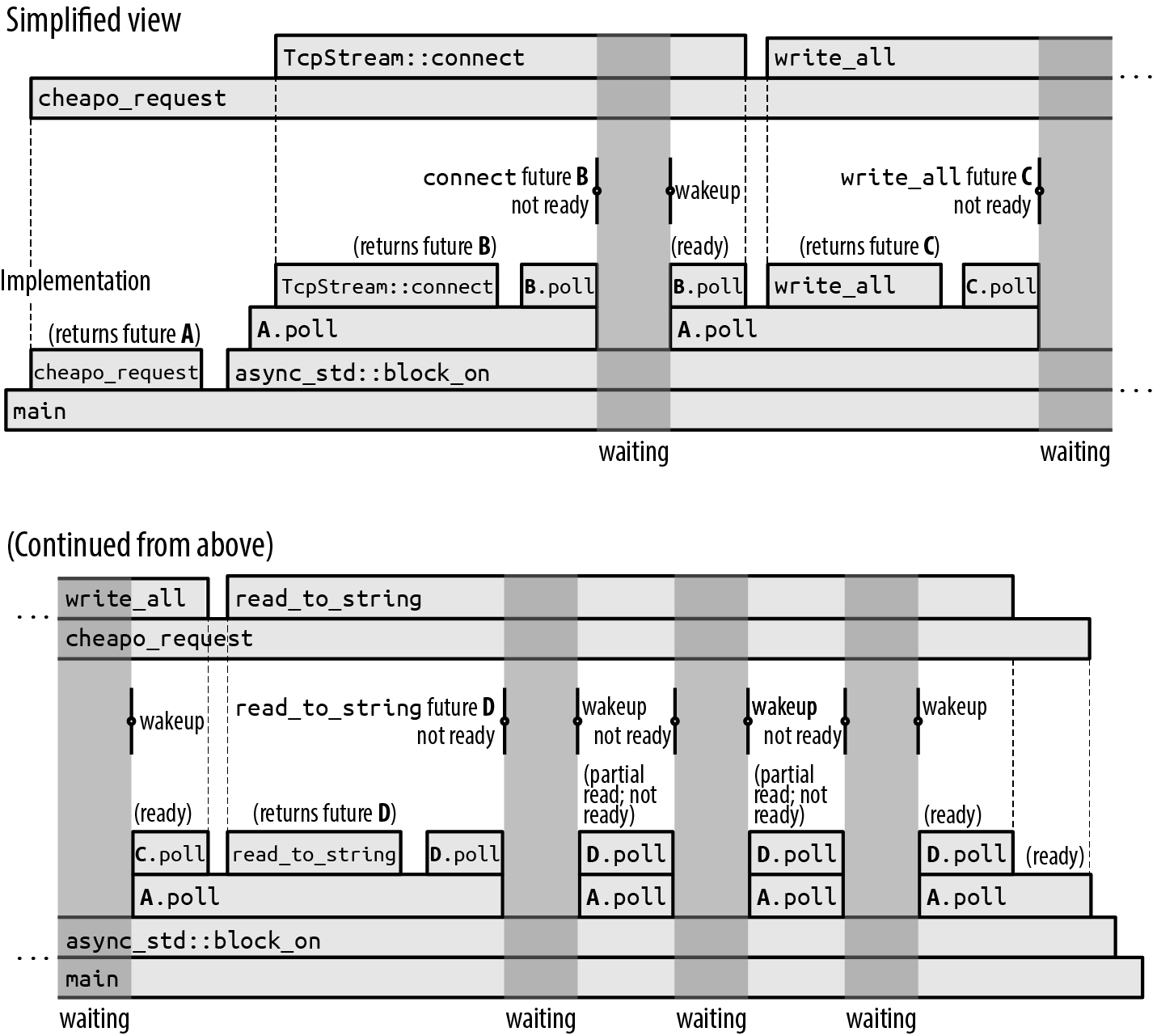
Figure 20-2. Blocking on an asynchronous function
But each of those asynchronous calls is a multistep process: a future is created and then polled until it’s ready, perhaps creating and polling other subfutures in the process. The lower timeline, “Implementation,” shows the actual synchronous calls that implement this asynchronous behavior. This is a good opportunity to walk through exactly what’s going on in ordinary asynchronous execution:
-
First,
maincallscheapo_request, which returns futureAof its final result. Thenmainpasses that future toasync_std::block_on, which polls it. -
Polling future
Aallows the body ofcheapo_requestto begin execution. It callsTcpStream::connectto obtain a futureBof a socket and then awaits that. More precisely, sinceTcpStream::connectmight encounter an error,Bis a future of aResult<TcpStream, std::io::Error>. -
Future
Bgets polled by theawait. Since the network connection is not yet established,B.pollreturnsPoll::Pending, but arranges to wake up the calling task once the socket is ready. -
Since future
Bwasn’t ready,A.pollreturnsPoll::Pendingto its own caller,block_on. -
Since
block_onhas nothing better to do, it goes to sleep. The entire thread is blocked now. -
When
B’s connection is ready to use, it wakes up the task that polled it. This stirsblock_oninto action, and it tries polling the futureAagain. -
Polling
Acausescheapo_requestto resume in its firstawait, where it pollsBagain. -
This time,
Bis ready: socket creation is complete, so it returnsPoll::Ready(Ok(socket))toA.poll. -
The asynchronous call to
TcpStream::connectis now complete. The value of theTcpStream::connect(...).awaitexpression is thusOk(socket). -
The execution of
cheapo_request’s body proceeds normally, building the request string using theformat!macro and passing it tosocket.write_all. -
Since
socket.write_allis an asynchronous function, it returns a futureCof its result, whichcheapo_requestduly awaits.
The rest of the story is similar. In the execution shown in Figure 20-2, the future of socket.read_to_string gets polled four times before it is ready; each of these wakeups reads some data from the socket, but read_to_string is specified to read all the way to the end of the input, and this takes several operations.
It doesn’t sound too hard to just write a loop that calls poll over and over. But what makes async_std::task::block_on valuable is that it knows how to go to sleep until the future is actually worth polling again, rather than wasting your processor time and battery life making billions of fruitless poll calls. The futures returned by basic I/O functions like connect and read_to_string retain the waker supplied by the Context passed to poll and invoke it when block_on should wake up and try polling again. We’ll show exactly how this works by implementing a simple version of block_on ourselves in “Primitive Futures and Executors: When Is a Future Worth Polling Again?”.
Like the original, synchronous version we presented earlier, this asynchronous version of cheapo_request spends almost all of its time waiting for operations to complete. If the time axis were drawn to scale, the diagram would be almost entirely dark gray, with tiny slivers of computation occurring when the program gets woken up.
This is a lot of detail. Fortunately, you can usually just think in terms of the simplified upper timeline: some function calls are sync, others are async and need an await, but they’re all just function calls. The success of Rust’s asynchronous support depends on helping programmers work with the simplified view in practice, without being distracted by the back-and-forth of the implementation.
Spawning Async Tasks
The async_std::task::block_on function blocks until a future’s value is ready. But blocking a thread completely on a single future is no better than a synchronous call: the goal of this chapter is to get the thread doing other work while it’s waiting.
For this, you can use async_std::task::spawn_local. This function takes a future and adds it to a pool that block_on will try polling whenever the future it’s blocking on isn’t ready. So if you pass a bunch of futures to spawn_local and then apply block_on to a future of your final result, block_on will poll each spawned future whenever it is able to make progress, running the entire pool concurrently until your result is ready.
As of this writing, spawn_local is available in async-std only if you enable that crate’s unstable feature. To do this, you’ll need to refer to async-std in your Cargo.toml with a line like this:
async-std = { version = "1", features = ["unstable"] }
The spawn_local function is an asynchronous analogue of the standard library’s std::thread::spawn function for starting threads:
-
std::thread::spawn(c)takes a closurecand starts a thread running it, returning astd::thread::JoinHandlewhosejoinmethod waits for the thread to finish and returns whatevercreturned. -
async_std::task::spawn_local(f)takes the futurefand adds it to the pool to be polled when the current thread callsblock_on.spawn_localreturns its ownasync_std::task::JoinHandletype, itself a future that you can await to retrievef’s final value.
For example, suppose we want to make a whole set of HTTP requests concurrently. Here’s a first attempt:
pubasyncfnmany_requests(requests:Vec<(String,u16,String)>)->Vec<std::io::Result<String>>{useasync_std::task;letmuthandles=vec![];for(host,port,path)inrequests{handles.push(task::spawn_local(cheapo_request(&host,port,&path)));}letmutresults=vec![];forhandleinhandles{results.push(handle.await);}results}
This function calls cheapo_request on each element of requests, passing each call’s future to spawn_local. It collects the resulting JoinHandles in a vector and then awaits each of them. It’s fine to await the join handles in any order: since the requests are already spawned, their futures will be polled as needed whenever this thread calls block_on and has nothing better to do. All the requests will run concurrently. Once they’re complete, many_requests returns the results to its caller.
The previous code is almost correct, but Rust’s borrow checker is worried about the lifetime of cheapo_request’s future:
error: `host` does not live long enoughhandles.push(task::spawn_local(cheapo_request(&host, port, &path)));---------------^^^^^--------------| || borrowed value does not| live long enoughargument requires that `host` is borrowed for `'static`}- `host` dropped here while still borrowed
There’s a similar error for path as well.
Naturally, if we pass references to an asynchronous function, the future it returns must hold those references, so the future cannot safely outlive the values they borrow. This is the same restriction that applies to any value that holds references.
The problem is that spawn_local can’t be sure you’ll wait for the task to finish before host and path are dropped. In fact, spawn_local only accepts futures whose lifetimes are 'static, because you could simply ignore the JoinHandle it returns and let the task continue to run for the rest of the program’s execution. This isn’t unique to asynchronous tasks: you’ll get a similar error if you try to use std::thread::spawn to start a thread whose closure captures references to local variables.
One way to fix this is to create another asynchronous function that takes owned versions of the arguments:
asyncfncheapo_owning_request(host:String,port:u16,path:String)->std::io::Result<String>{cheapo_request(&host,port,&path).await}
This function takes Strings instead of &str references, so its future owns the host and path strings itself, and its lifetime is 'static. The borrow checker can see that it immediately awaits cheapo_request’s future, and hence, if that future is getting polled at all, the host and path variables it borrows must still be around. All is well.
Using cheapo_owning_request, you can spawn off all your requests like so:
for(host,port,path)inrequests{handles.push(task::spawn_local(cheapo_owning_request(host,port,path)));}
You can call many_requests from your synchronous main function, with block_on:
letrequests=vec![("example.com".to_string(),80,"/".to_string()),("www.red-bean.com".to_string(),80,"/".to_string()),("en.wikipedia.org".to_string(),80,"/".to_string()),];letresults=async_std::task::block_on(many_requests(requests));forresultinresults{matchresult{Ok(response)=>println!("{}",response),Err(err)=>eprintln!("error: {}",err),}}
This code runs all three requests concurrently from within the call to block_on. Each one makes progress as the opportunity arises while the others are blocked, all on the calling thread. Figure 20-3 shows one possible execution of the three calls to cheapo_request.
(We encourage you to try running this code yourself, with eprintln! calls added at the top of cheapo_request and after each await expression so that you can see how the calls interleave differently from one execution to the next.)
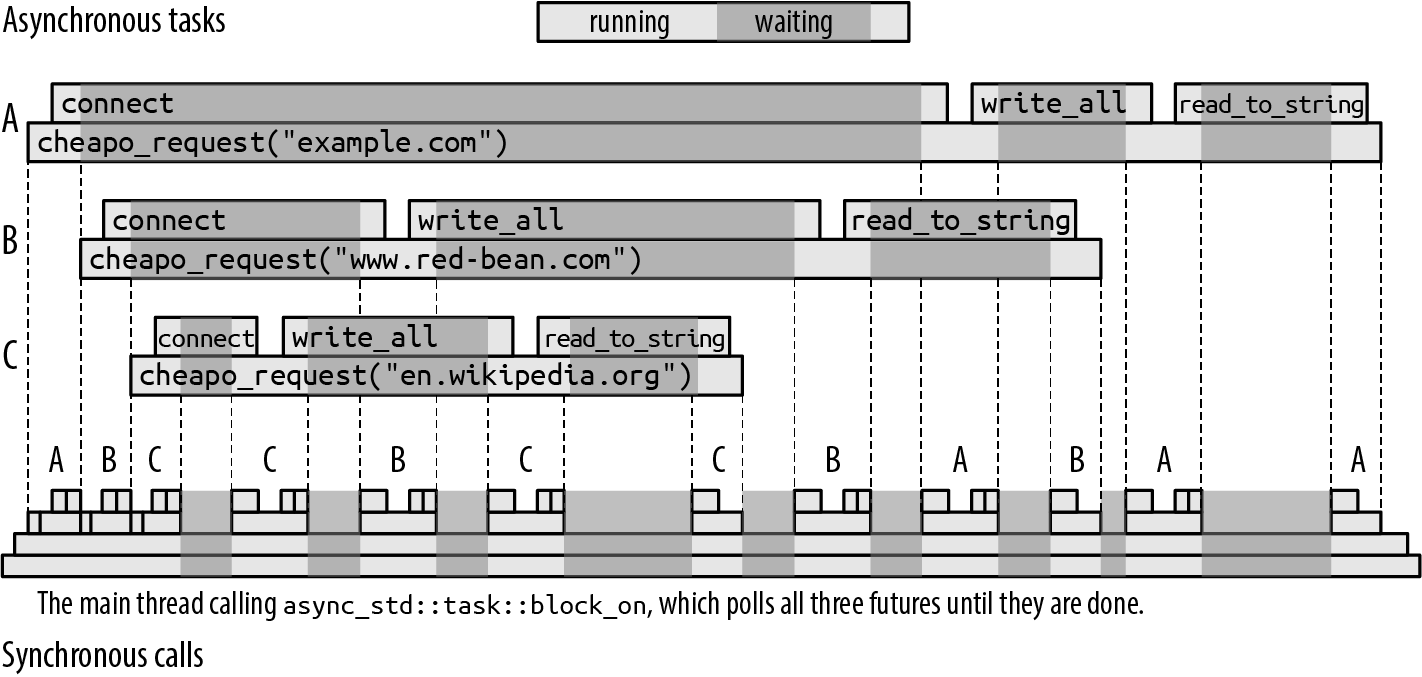
Figure 20-3. Running three asynchronous tasks on a single thread
The call to many_requests (not shown, for simplicity) has spawned three asynchronous tasks, which we’ve labeled A, B, and C. block_on begins by polling A, which starts connecting to example.com. As soon as this returns Poll::Pending, block_on turns its attention to the next spawned task, polling future B, and eventually C, which each begin connecting to their respective servers.
When all the pollable futures have returned Poll::Pending, block_on goes to sleep until one of the TcpStream::connect futures indicates that its task is worth polling again.
In this execution, the server en.wikipedia.org responds more quickly than the others, so that task finishes first. When a spawned task is done, it saves its value in its JoinHandle and marks it as ready, so that many_requests can proceed when it awaits it. Eventually, the other calls to cheapo_request will either succeed or return an error, and many_requests itself can return. Finally, main receives the vector of results from block_on.
All this execution takes place on a single thread, the three calls to cheapo_request being interleaved with each other through successive polls of their futures. An asynchronous call offers the appearance of a single function call running to completion, but this asynchronous call is realized by a series of synchronous calls to the future’s poll method. Each individual poll call returns quickly, yielding the thread so that another async call can take a turn.
We have finally achieved the goal we set out at the beginning of the chapter: letting a thread take on other work while it waits for I/O to complete so that the thread’s resources aren’t tied up doing nothing. Even better, this goal was met with code that looks very much like ordinary Rust code: some of the functions are marked async, some of the function calls are followed by .await, and we use functions from async_std instead of std, but otherwise, it’s ordinary Rust code.
One important difference to keep in mind between asynchronous tasks and threads is that switching from one async task to another happens only at await expressions, when the future being awaited returns Poll::Pending. This means that if you put a long-running computation in cheapo_request, none of the other tasks you passed to spawn_local will get a chance to run until it’s done. With threads, this problem doesn’t arise: the operating system can suspend any thread at any point and sets timers to ensure that no thread monopolizes the processor. Asynchronous code depends on the willing cooperation of the futures sharing the thread. If you need to have long-running computations coexist with asynchronous code, “Long Running Computations: yield_now and spawn_blocking” later in this chapter describes some options.
Async Blocks
In addition to asynchronous functions, Rust also supports asynchronous blocks. Whereas an ordinary block statement returns the value of its last expression, an async block returns a future of the value of its last expression. You can use await expressions within an async block.
An async block looks like an ordinary block statement, preceded by the async keyword:
letserve_one=async{useasync_std::net;// Listen for connections, and accept one.letlistener=net::TcpListener::bind("localhost:8087").await?;let(mutsocket,_addr)=listener.accept().await?;// Talk to client on `socket`....};
This initializes serve_one with a future that, when polled, listens for and handles a single TCP connection. The block’s body does not begin execution until serve_one gets polled, just as an async function call doesn’t begin execution until its future is polled.
If you apply the ? operator to an error in an async block, it just returns from the block, not from the surrounding function. For example, if the preceding bind call returns an error, the ? operator returns it as serve_one’s final value. Similarly, return expressions return from the async block, not the enclosing function.
If an async block refers to variables defined in the surrounding code, its future captures their values, just as a closure would. And just like move closures (see “Closures That Steal”), you can start the block with async move to take ownership of the captured values, rather than just holding references to them.
Async blocks provide a concise way to separate out a section of code you’d like to run asynchronously. For example, in the previous section, spawn_local required a 'static future, so we defined the cheapo_owning_request wrapper function to give us a future that took ownership of its arguments. You can get the same effect without the distraction of a wrapper function simply by calling cheapo_request from an async block:
pubasyncfnmany_requests(requests:Vec<(String,u16,String)>)->Vec<std::io::Result<String>>{useasync_std::task;letmuthandles=vec![];for(host,port,path)inrequests{handles.push(task::spawn_local(asyncmove{cheapo_request(&host,port,&path).await}));}...}
Since this is an async move block, its future takes ownership of the String values host and path, just the way a move closure would. It then passes references to cheapo_request. The borrow checker can see that the block’s await expression takes ownership of cheapo_request’s future, so the references to host and path cannot outlive the captured variables they borrow. The async block accomplishes the same thing as cheapo_owning_request, but with less boilerplate.
One rough edge you may encounter is that there is no syntax for specifying the return type of an async block, analogous to the -> T following the arguments of an async function. This can cause problems when using the ? operator:
letinput=async_std::io::stdin();letfuture=async{letmutline=String::new();// This returns `std::io::Result<usize>`.input.read_line(&mutline).await?;println!("Read line: {}",line);Ok(())};
This fails with the following error:
error: type annotations needed|42 | let future = async {| ------ consider giving `future` a type...46 | input.read_line(&mut line).await?;| ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^ cannot infer type
Rust can’t tell what the return type of the async block should be. The read_line method returns Result<(), std::io:Error>, but because the ? operator uses the From trait to convert the error type at hand to whatever the situation requires, the async block’s return type could be Result<(), E> for any type E that implements From<std::io::Error>.
Future versions of Rust will probably add syntax for indicating an async block’s return type. For now, you can work around the problem by spelling out the type of the block’s final Ok:
letfuture=async{...Ok::<(),std::io::Error>(())};
Since Result is a generic type that expects the success and error types as its parameters, we can specify those type parameters when using Ok or Err as shown here.
Building Async Functions from Async Blocks
Asynchronous blocks give us another way to get the same effect as an asynchronous function, with a little more flexibility. For example, we could write our cheapo_request example as an ordinary, synchronous function that returns the future of an async block:
usestd::io;usestd::future::Future;fncheapo_request<'a>(host:&'astr,port:u16,path:&'astr)->implFuture<Output=io::Result<String>>+'a{asyncmove{...functionbody...}}
When you call this version of the function, it immediately returns the future of the async block’s value. This captures the function’s arguments and behaves just like the future the asynchronous function would have returned. Since we’re not using the async fn syntax, we need to write out the impl Future in the return type, but as far as callers are concerned, these two definitions are interchangeable implementations of the same function signature.
This second approach can be useful when you want to do some computation immediately when the function is called, before creating the future of its result. For example, yet another way to reconcile cheapo_request with spawn_local would be to make it into a synchronous function returning a 'static future that captures fully owned copies of its arguments:
fncheapo_request(host:&str,port:u16,path:&str)->implFuture<Output=io::Result<String>>+'static{lethost=host.to_string();letpath=path.to_string();asyncmove{...use&*host,port,andpath...}}
This version lets the async block capture host and path as owned String values, not &str references. Since the future owns all the data it needs to run, it is valid for the 'static lifetime. (We’ve spelled out + 'static in the signature shown earlier, but 'static is the default for -> impl return types, so omitting it would have no effect.)
Since this version of cheapo_request returns futures that are 'static, we can pass them directly to spawn_local:
letjoin_handle=async_std::task::spawn_local(cheapo_request("areweasyncyet.rs",80,"/"));...otherwork...letresponse=join_handle.await?;
Spawning Async Tasks on a Thread Pool
The examples we’ve shown so far spend almost all their time waiting for I/O, but some workloads are more of a mix of processor work and blocking. When you have enough computation to do that a single processor can’t keep up, you can use async_std::task::spawn to spawn a future onto a pool of worker threads dedicated to polling futures that are ready to make progress.
async_std::task::spawn is used like async_std::task::spawn_local:
useasync_std::task;letmuthandles=vec![];for(host,port,path)inrequests{handles.push(task::spawn(asyncmove{cheapo_request(&host,port,&path).await}));}...
Like spawn_local, spawn returns a JoinHandle value you can await to get the future’s final value. But unlike spawn_local, the future doesn’t have to wait for you to call block_on before it gets polled. As soon as one of the threads from the thread pool is free, it will try polling it.
In practice, spawn is more widely used than spawn_local, simply because people like to know that their workload, no matter what its mix of computation and blocking, is balanced across the machine’s resources.
One thing to keep in mind when using spawn is that the thread pool tries to stay busy, so your future gets polled by whichever thread gets around to it first. An async call may begin execution on one thread, block on an await expression, and get resumed in a different thread. So while it’s a reasonable simplification to view an async function call as a single, connected execution of code (indeed, the purpose of asynchronous functions and await expressions is to encourage you to think of it that way), the call may actually be carried out by many different threads.
If you’re using thread-local storage, it may be surprising to see the data you put there before an await expression replaced by something entirely different afterward, because your task is now being polled by a different thread from the pool. If this is a problem, you should instead use task-local storage; see the async-std crate’s documentation for the task_local! macro for details.
But Does Your Future Implement Send?
There is one restriction spawn imposes that spawn_local does not. Since the future is being sent off to another thread to run, the future must implement the Send marker trait. We presented Send in “Thread Safety: Send and Sync”. A future is Send only if all the values it contains are Send: all the function arguments, local variables, and even anonymous temporary values must be safe to move to another thread.
As before, this requirement isn’t unique to asynchronous tasks: you’ll get a similar error if you try to use std::thread::spawn to start a thread whose closure captures non-Send values. The difference is that, whereas the closure passed to std::thread::spawn stays on the thread that was created to run it, a future spawned on a thread pool can move from one thread to another any time it awaits.
This restriction is easy to trip over by accident. For example, the following code looks innocent enough:
useasync_std::task;usestd::rc::Rc;asyncfnreluctant()->String{letstring=Rc::new("ref-counted string".to_string());some_asynchronous_thing().await;format!("Your splendid string: {}",string)}task::spawn(reluctant());
An asynchronous function’s future needs to hold enough information for the function to continue from an await expression. In this case, reluctant’s future must use string after the await, so the future will, at least sometimes, contain an Rc<String> value. Since Rc pointers cannot be safely shared between threads, the future itself cannot be Send. And since spawn only accepts futures that are Send, Rust objects:
error: future cannot be sent between threads safely|17 | task::spawn(reluctant());| ^^^^^^^^^^^ future returned by `reluctant` is not `Send`||127 | T: Future + Send + 'static,| ---- required by this bound in `async_std::task::spawn`|= help: within `impl Future`, the trait `Send` is not implementedfor `Rc<String>`note: future is not `Send` as this value is used across an await|10 | let string = Rc::new("ref-counted string".to_string());| ------ has type `Rc<String>` which is not `Send`11 |12 | some_asynchronous_thing().await;| ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^await occurs here, with `string` maybe used later...15 | }| - `string` is later dropped here
This error message is long, but it has a lot of helpful detail:
-
It explains why the future needs to be
Send:task::spawnrequires it. -
It explains which value is not
Send: the local variablestring, whose type isRc<String>. -
It explains why
stringaffects the future: it is in scope across the indicatedawait.
There are two ways to fix this problem. One is to restrict the scope of the non-Send value so that it doesn’t cover any await expressions and thus doesn’t need to be saved in the function’s future:
asyncfnreluctant()->String{letreturn_value={letstring=Rc::new("ref-counted string".to_string());format!("Your splendid string: {}",string)// The `Rc<String>` goes out of scope here...};// ... and thus is not around when we suspend here.some_asynchronous_thing().await;return_value}
Another solution is simply to use std::sync::Arc instead of Rc. Arc uses atomic updates to manage its reference counts, which makes it a bit slower, but Arc pointers are Send.
Although eventually you’ll learn to recognize and avoid non-Send types, they can be a bit surprising at first. (At least, your authors were often surprised.) For example, older Rust code sometimes uses generic result types like this:
// Not recommended!typeGenericError=Box<dynstd::error::Error>;typeGenericResult<T>=Result<T,GenericError>;
This GenericError type uses a boxed trait object to hold a value of any type that implements std::error::Error. But it doesn’t place any further restrictions on it: if someone had a non-Send type that implemented Error, they could convert a boxed value of that type to a GenericError. Because of this possibility, GenericError is not Send, and the following code won’t work:
fnsome_fallible_thing()->GenericResult<i32>{...}// This function's future is not `Send`...asyncfnunfortunate(){// ... because this call's value ...matchsome_fallible_thing(){Err(error)=>{report_error(error);}Ok(output)=>{// ... is alive across this await ...use_output(output).await;}}}// ... and thus this `spawn` is an error.async_std::task::spawn(unfortunate());
As with the earlier example, the error message from the compiler explains what’s going on, pointing to the Result type as the culprit. Since Rust considers the result of some_fallible_thing to be present for the entire match statement, including the await expression, it determines that the future of unfortunate is not Send. This error is overcautious on Rust’s part: although it’s true that GenericError is not safe to send to another thread, the await only occurs when the result is Ok, so the error value never actually exists when we await use_output’s future.
The ideal solution is to use stricter generic error types like the ones we suggested in “Working with Multiple Error Types”:
typeGenericError=Box<dynstd::error::Error+Send+Sync+'static>;typeGenericResult<T>=Result<T,GenericError>;
This trait object explicitly requires the underlying error type to implement Send, and all is well.
If your future is not Send and you cannot conveniently make it so, then you can still use spawn_local to run it on the current thread. Of course, you’ll need to make sure the thread calls block_on at some point, to give it a chance to run, and you won’t benefit from distributing the work across multiple processors.
Long Running Computations: yield_now and spawn_blocking
For a future to share its thread nicely with other tasks, its poll method should always return as quickly as possible. But if you’re carrying out a long computation, it could take a long time to reach the next await, making other asynchronous tasks wait longer than you’d like for their turn on the thread.
One way to avoid this is simply to await something occasionally. The async_std::task::yield_now function returns a simple future designed for this:
whilecomputation_not_done(){...doonemedium-sizedstepofcomputation...async_std::task::yield_now().await;}
The first time the yield_now future is polled, it returns Poll::Pending, but says it’s worth polling again soon. The effect is that your asynchronous call gives up the thread and other tasks get a chance to run, but your call will get another turn soon. The second time yield_now’s future is polled, it returns Poll::Ready(()), and your async function can resume execution.
This approach isn’t always feasible, however. If you’re using an external crate to do the long-running computation or calling out to C or C++, it may not be convenient to change that code to be more async-friendly. Or it may be difficult to ensure that every path through the computation is sure to hit the await from time to time.
For cases like this, you can use async_std::task::spawn_blocking. This function takes a closure, starts it running on its own thread, and returns a future of its return value. Asynchronous code can await that future, yielding its thread to other tasks until the computation is ready. By putting the hard work on a separate thread, you can let the operating system take care of making it share the processor nicely.
For example, suppose we need to check passwords supplied by users against the hashed versions we’ve stored in our authentication database. For security, verifying a password needs to be computationally intensive so that even if attackers get a copy of our database, they can’t simply try trillions of possible passwords to see if any match. The argonautica crate provides a hash function designed specifically for storing passwords: a properly generated argonautica hash takes a significant fraction of a second to verify. We can use argonautica (version 0.2) in our asynchronous application like this:
asyncfnverify_password(password:&str,hash:&str,key:&str)->Result<bool,argonautica::Error>{// Make copies of the arguments, so the closure can be 'static.letpassword=password.to_string();lethash=hash.to_string();letkey=key.to_string();async_std::task::spawn_blocking(move||{argonautica::Verifier::default().with_hash(hash).with_password(password).with_secret_key(key).verify()}).await}
This returns Ok(true) if password matches hash, given key, a key for the database as a whole. By doing the verification in the closure passed to spawn_blocking, we push the expensive computation onto its own thread, ensuring that it will not affect our responsiveness to other users’ requests.
Comparing Asynchronous Designs
In many ways Rust’s approach to asynchronous programming resembles that taken by other languages. For example, JavaScript, C#, and Rust all have asynchronous functions with await expressions. And all these languages have values that represent incomplete computations: Rust calls them “futures,” JavaScript calls them “promises,” and C# calls them “tasks,” but they all represent a value that you may have to wait for.
Rust’s use of polling, however, is unusual. In JavaScript and C#, an asynchronous function begins running as soon as it is called, and there is a global event loop built into the system library that resumes suspended async function calls when the values they were awaiting become available. In Rust, however, an async call does nothing until you pass it to a function like block_on, spawn, or spawn_local that will poll it and drive the work to completion. These functions, called executors, play the role that other languages cover with a global event loop.
Because Rust makes you, the programmer, choose an executor to poll your futures, Rust has no need for a global event loop built into the system. The async-std crate offers the executor functions we’ve used in this chapter so far, but the tokio crate, which we’ll use later in this chapter, defines its own set of similar executor functions. And toward the end of this chapter, we’ll implement our own executor. You can use all three in the same program.
A Real Asynchronous HTTP Client
We would be remiss if we did not show an example of using a proper asynchronous HTTP client crate, since it is so easy, and there are several good crates to choose from, including reqwest and surf.
Here’s a rewrite of many_requests, even simpler than the one based on cheapo_request, that uses surf to run a series of requests concurrently. You’ll need these dependencies in your Cargo.toml file:
[dependencies] async-std = "1.7" surf = "1.0"
Then, we can define many_requests as follows:
pubasyncfnmany_requests(urls:&[String])->Vec<Result<String,surf::Exception>>{letclient=surf::Client::new();letmuthandles=vec![];forurlinurls{letrequest=client.get(&url).recv_string();handles.push(async_std::task::spawn(request));}letmutresults=vec![];forhandleinhandles{results.push(handle.await);}results}fnmain(){letrequests=&["http://example.com".to_string(),"https://www.red-bean.com".to_string(),"https://en.wikipedia.org/wiki/Main_Page".to_string()];letresults=async_std::task::block_on(many_requests(requests));forresultinresults{matchresult{Ok(response)=>println!("*** {}\n",response),Err(err)=>eprintln!("error: {}\n",err),}}}
Using a single surf::Client to make all our requests lets us reuse HTTP connections if several of them are directed at the same server. And no async block is needed: since recv_string is an asynchronous method that returns a Send + 'static future, we can pass its future directly to spawn.
An Asynchronous Client and Server
It’s time to take the key ideas we’ve discussed so far and assemble them into a working program. To a large extent, asynchronous applications resemble ordinary multi-threaded applications, but there are new opportunities for compact and expressive code that you can look out for.
This section’s example is a chat server and client. Check out the complete code. Real chat systems are complicated, with concerns ranging from security and reconnection to privacy and moderation, but we’ve pared ours down to an austere set of features in order to focus on a few points of interest.
In particular, we want to handle backpressure well. By this we mean that if one client has a slow net connection or drops its connection entirely, that must never affect other clients’ ability to exchange messages at their own pace. And since a slow client should not make the server spend unbounded memory holding on to its ever-growing backlog of messages, our server should drop messages for clients that can’t keep up, but notify them that their stream is incomplete. (A real chat server would log messages to disk and let clients retrieve those they’ve missed, but we’ve left that out.)
We start the project with the command cargo new --lib async-chat and put the following text in async-chat/Cargo.toml:
[package]
name = "async-chat"
version = "0.1.0"
authors = ["You <you@example.com>"]
edition = "2018"
[dependencies]
async-std = { version = "1.7", features = ["unstable"] }
tokio = { version = "1.0", features = ["sync"] }
serde = { version = "1.0", features = ["derive", "rc"] }
serde_json = "1.0"
We’re depending on four crates:
-
The
async-stdcrate is the collection of asynchronous I/O primitives and utilities we’ve been using throughout the chapter. -
The
tokiocrate is another collection of asynchronous primitives likeasync-std, one of the oldest and most mature. It’s widely used and holds its design and implementation to high standards, but requires a bit more care to use thanasync-std.tokiois a large crate, but we need only one component from it, so thefeatures = ["sync"]field in the Cargo.toml dependency line parestokiodown to the parts that we need, making this a light dependency.When the asynchronous library ecosystem was less mature, people avoided using both
tokioandasync-stdin the same program, but the two projects have been cooperating to make sure this works, as long as each crate’s documented rules are followed. -
The
serdeandserde_jsoncrates we’ve seen before, in Chapter 18. These give us convenient and efficient tools for generating and parsing JSON, which our chat protocol uses to represent data on the network. We want to use some optional features fromserde, so we select those when we give the dependency.
The entire structure of our chat application, client and server, looks like this:
async-chat├── Cargo.toml└── src├── lib.rs├── utils.rs└── bin├── client.rs└── server├── main.rs├── connection.rs├── group.rs└── group_table.rs
This package layout uses a Cargo feature we touched on in “The src/bin Directory”: in addition to the main library crate, src/lib.rs, with its submodule src/utils.rs, it also includes two executables:
-
src/bin/client.rs is a single-file executable for the chat client.
-
src/bin/server is the server executable, spread across four files: main.rs holds the
mainfunction, and there are three submodules, connection.rs, group.rs, and group_table.rs.
We’ll present the contents of each source file over the course of the chapter, but once they’re all in place, if you type cargo build in this tree, that compiles the library crate and then builds both executables. Cargo automatically includes the library crate as a dependency, making it a convenient place to put definitions shared by the client and server. Similarly, cargo check checks the entire source tree. To run either of the executables, you can use commands like these:
$cargo run --release --bin server -- localhost:8088$cargo run --release --bin client -- localhost:8088
The --bin option indicates which executable to run, and any arguments following the -- option get passed to the executable itself. Our client and server just want to know the server’s address and TCP port.
Error and Result Types
The library crate’s utils module defines the result and error types we’ll use throughout the application. From src/utils.rs:
usestd::error::Error;pubtypeChatError=Box<dynError+Send+Sync+'static>;pubtypeChatResult<T>=Result<T,ChatError>;
These are the general-purpose error types we suggested in “Working with Multiple Error Types”. The async_std, serde_json, and tokio crates each define their own error types, but the ? operator can automatically convert them all into a ChatError, using the standard library’s implementation of the From trait that can convert any suitable error type to Box<dyn Error + Send + Sync + 'static>. The Send and Sync bounds ensure that if a task spawned onto another thread fails, it can safely report the error to the main thread.
In a real application, consider using the anyhow crate, which provides Error and Result types similar to these. The anyhow crate is easy to use and provides some nice features beyond what our ChatError and ChatResult can offer.
The Protocol
The library crate captures our entire chat protocol in these two types, defined in lib.rs:
useserde::{Deserialize,Serialize};usestd::sync::Arc;pubmodutils;#[derive(Debug, Deserialize, Serialize, PartialEq)]pubenumFromClient{Join{group_name:Arc<String>},Post{group_name:Arc<String>,message:Arc<String>,},}#[derive(Debug, Deserialize, Serialize, PartialEq)]pubenumFromServer{Message{group_name:Arc<String>,message:Arc<String>,},Error(String),}#[test]fntest_fromclient_json(){usestd::sync::Arc;letfrom_client=FromClient::Post{group_name:Arc::new("Dogs".to_string()),message:Arc::new("Samoyeds rock!".to_string()),};letjson=serde_json::to_string(&from_client).unwrap();assert_eq!(json,r#"{"Post":{"group_name":"Dogs","message":"Samoyeds rock!"}}"#);assert_eq!(serde_json::from_str::<FromClient>(&json).unwrap(),from_client);}
The FromClient enum represents the packets a client can send to the server: it can ask to join a room and post messages to any room it has joined. FromServer represents what the server can send back: messages posted to some group, and error messages. Using a reference-counted Arc<String> instead of a plain String helps the server avoid making copies of strings as it manages groups and distributes messages.
The #[derive] attributes tell the serde crate to generate implementations of its Serialize and Deserialize traits for FromClient and FromServer. This lets us call serde_json::to_string to convert them to JSON values, send them across the network, and finally call serde_json::from_str to convert them back into their Rust forms.
The test_fromclient_json unit test illustrates how this is used. Given the Serialize implementation derived by serde, we can call serde_json::to_string to turn the given FromClient value into this JSON:
{"Post":{"group_name":"Dogs","message":"Samoyeds rock!"}}
Then the derived Deserialize implementation parses that back into an equivalent FromClient value. Note that the Arc pointers in FromClient have no effect on the serialized form: the reference-counted strings appear directly as JSON object member values.
Taking User Input: Asynchronous Streams
Our chat client’s first responsibility is to read commands from the user and send the corresponding packets to the server. Managing a proper user interface is beyond the scope of this chapter, so we’re going to do the simplest possible thing that works: reading lines directly from standard input. The following code goes in src/bin/client.rs:
useasync_std::prelude::*;useasync_chat::utils::{self,ChatResult};useasync_std::io;useasync_std::net;asyncfnsend_commands(mutto_server:net::TcpStream)->ChatResult<()>{println!("Commands:\n\join GROUP\n\post GROUP MESSAGE...\n\Type Control-D (on Unix) or Control-Z (on Windows) \to close the connection.");letmutcommand_lines=io::BufReader::new(io::stdin()).lines();whileletSome(command_result)=command_lines.next().await{letcommand=command_result?;// See the GitHub repo for the definition of `parse_command`.letrequest=matchparse_command(&command){Some(request)=>request,None=>continue,};utils::send_as_json(&mutto_server,&request).await?;to_server.flush().await?;}Ok(())}
This calls async_std::io::stdin to get an asynchronous handle on the client’s standard input, wraps it in an async_std::io::BufReader to buffer it, and then calls lines to process the user’s input line by line. It tries to parse each line as a command corresponding to some FromClient value and, if it succeeds, sends that value to the server. If the user enters an unrecognized command, parse_command prints an error message and returns None, so send_commands can go around the loop again. If the user types an end-of-file indication, then the lines stream returns None, and send_commands returns. This is very much like the code you would write in an ordinary, synchronous program, except that it uses async_std’s versions of the library features.
The asynchronous BufReader’s lines method is interesting. It can’t return an iterator, the way the standard library does: the Iterator::next method is an ordinary synchronous function, so calling commands.next() would block the thread until the next line was ready. Instead, lines returns a stream of Result<String> values. A stream is the asynchronous analogue of an iterator: it produces a sequence of values on demand, in an async-friendly fashion. Here’s the definition of the Stream trait, from the async_std::stream module:
traitStream{typeItem;// For now, read `Pin<&mut Self>` as `&mut Self`.fnpoll_next(self:Pin<&mutSelf>,cx:&mutContext<'_>)->Poll<Option<Self::Item>>;}
You can look at this as a hybrid of the Iterator and Future traits. Like an iterator, a Stream has an associated Item type and uses Option to indicate when the sequence has ended. But like a future, a stream must be polled: to get the next item (or learn that the stream has ended), you must call poll_next until it returns Poll::Ready. A stream’s poll_next implementation should always return quickly, without blocking. And if a stream returns Poll::Pending, it must notify the caller when it’s worth polling again via the Context.
The poll_next method is awkward to use directly, but you won’t generally need to do that. Like iterators, streams have a broad collection of utility methods like filter and map. Among these is a next method, which returns a future of the stream’s next Option<Self::Item>. Rather than polling the stream explicitly, you can call next and await the future it returns instead.
Putting these pieces together, send_commands consumes the stream of input lines by looping over the values produced by a stream using next with while let:
whileletSome(item)=stream.next().await{...useitem...}
(Future versions of Rust will probably introduce an asynchronous variant of the for loop syntax for consuming streams, just as an ordinary for loop consumes Iterator values.)
Polling a stream after it has ended—that is, after it has returned Poll::Ready(None) to indicate the end of the stream—is like calling next on an iterator after it has returned None, or polling a future after it has returned Poll::Ready: the Stream trait doesn’t specify what the stream should do, and some streams may misbehave. Like futures and iterators, streams have a fuse method to ensure such calls behave predictably, when that’s needed; see the documentation for details.
When working with streams, it’s important to remember to use the async_std prelude:
useasync_std::prelude::*;
This is because the utility methods for the Stream trait, like next, map, filter, and so on, are actually not defined on Stream itself. Instead, they are default methods of a separate trait, StreamExt, which is automatically implemented for all Streams:
pubtraitStreamExt:Stream{...defineutilitymethodsasdefaultmethods...}impl<T:Stream>StreamExtforT{}
This is an example of the extension trait pattern we described in “Traits and Other People’s Types”. The async_std::prelude module brings the StreamExt methods into scope, so using the prelude ensures its methods are visible in your code.
Sending Packets
For transmitting packets on a network socket, our client and server use the send_as_json function from our library crate’s utils module:
useasync_std::prelude::*;useserde::Serialize;usestd::marker::Unpin;pubasyncfnsend_as_json<S,P>(outbound:&mutS,packet:&P)->ChatResult<()>whereS:async_std::io::Write+Unpin,P:Serialize,{letmutjson=serde_json::to_string(&packet)?;json.push('\n');outbound.write_all(json.as_bytes()).await?;Ok(())}
This function builds the JSON representation of packet as a String, adds a newline to the end, and then writes it all to outbound.
From its where clause, you can see that send_as_json is quite flexible. The type of packet to be sent, P, can be anything that implements serde::Serialize. The output stream S can be anything that implements async_std::io::Write, the asynchronous version of the std::io::Write trait for output streams. This is sufficient for us to send FromClient and FromServer values on an asynchronous TcpStream. Keeping the definition of send_as_json generic ensures that it doesn’t depend on the details of the stream or packet types in surprising ways: send_as_json can only use methods from those traits.
The Unpin constraint on S is required to use the write_all method. We’ll cover pinning and unpinning later in this chapter, but for the time being, it should suffice to just add Unpin constraints to type variables where required; the Rust compiler will point these cases out if you forget.
Rather than serializing the packet directly to the outbound stream, send_as_json serializes it to a temporary String and then writes that to outbound. The serde_json crate does provide functions to serialize values directly to output streams, but those functions only support synchronous streams. Writing to asynchronous streams would require fundamental changes to both serde_json and the serde crate’s format-independent core, since the traits they are designed around have synchronous methods.
As with streams, many of the methods of async_std’s I/O traits are actually defined on extension traits, so it’s important to remember to use async_std::prelude::* whenever you are using them.
Receiving Packets: More Asynchronous Streams
For receiving packets, our server and client will use this function from the utils module to receive FromClient and FromServer values from an asynchronous buffered TCP socket, an async_std::io::BufReader<TcpStream>:
useserde::de::DeserializeOwned;pubfnreceive_as_json<S,P>(inbound:S)->implStream<Item=ChatResult<P>>whereS:async_std::io::BufRead+Unpin,P:DeserializeOwned,{inbound.lines().map(|line_result|->ChatResult<P>{letline=line_result?;letparsed=serde_json::from_str::<P>(&line)?;Ok(parsed)})}
Like send_as_json, this function is generic in the input stream and packet types:
-
The stream type
Smust implementasync_std::io::BufRead, the asynchronous analogue ofstd::io::BufRead, representing a buffered input byte stream. -
The packet type
Pmust implementDeserializeOwned, a stricter variant ofserde’sDeserializetrait. For efficiency,Deserializecan produce&strand&[u8]values that borrow their contents directly from the buffer they were deserialized from, to avoid copying data. In our case, however, that’s no good: we need to return the deserialized values to our caller, so they must be able to outlive the buffers we parsed them from. A type that implementsDeserializeOwnedis always independent of the buffer it was deserialized from.
Calling inbound.lines() gives us a Stream of std::io::Result<String> values. We then use the stream’s map adapter to apply a closure to each item, handling errors and parsing each line as the JSON form of a value of type P. This gives us a stream of ChatResult<P> values, which we return directly. The function’s return type is:
implStream<Item=ChatResult<P>>
This indicates that we return some type that produces a sequence of ChatResult<P> values asynchronously, but our caller can’t tell exactly which type that is. Since the closure we pass to map has an anonymous type anyway, this is the most specific type receive_as_json could possibly return.
Notice that receive_as_json is not, itself, an asynchronous function. It is an ordinary function that returns an async value, a stream. Understanding the mechanics of Rust’s asynchronous support more deeply than “just add async and .await everywhere” opens up the potential for clear, flexible, and efficient definitions like this one that take full advantage of the language.
To see how receive_as_json gets used, here is our chat client’s handle_replies function from src/bin/client.rs, which receives a stream of FromServer values from the network and prints them out for the user to see:
useasync_chat::FromServer;asyncfnhandle_replies(from_server:net::TcpStream)->ChatResult<()>{letbuffered=io::BufReader::new(from_server);letmutreply_stream=utils::receive_as_json(buffered);whileletSome(reply)=reply_stream.next().await{matchreply?{FromServer::Message{group_name,message}=>{println!("message posted to {}: {}",group_name,message);}FromServer::Error(message)=>{println!("error from server: {}",message);}}}Ok(())}
This function takes a socket receiving data from the server, wraps a BufReader around it (note well, the async_std version), and then passes that to receive_as_json to obtain a stream of incoming FromServer values. Then it uses a while let loop to handle incoming replies, checking for error results and printing each server reply for the user to see.
The Client’s Main Function
Since we’ve presented both send_commands and handle_replies, we can show the chat client’s main function, from src/bin/client.rs:
useasync_std::task;fnmain()->ChatResult<()>{letaddress=std::env::args().nth(1).expect("Usage: client ADDRESS:PORT");task::block_on(async{letsocket=net::TcpStream::connect(address).await?;socket.set_nodelay(true)?;letto_server=send_commands(socket.clone());letfrom_server=handle_replies(socket);from_server.race(to_server).await?;Ok(())})}
Having obtained the server’s address from the command line, main has a series of asynchronous functions it would like to call, so it wraps the remainder of the function in an asynchronous block and passes the block’s future to async_std::task::block_on to run.
Once the connection is established, we want the send_commands and handle_replies functions to run in tandem, so we can see others’ messages arrive while we type. If we enter the end-of-file indicator or if the connection to the server drops, the program should exit.
Given what we’ve done elsewhere in the chapter, you might expect code like this:
letto_server=task::spawn(send_commands(socket.clone()));letfrom_server=task::spawn(handle_replies(socket));to_server.await?;from_server.await?;
But since we await both of the join handles, that gives us a program that exits once both tasks have finished. We want to exit as soon as either one has finished. The race method on futures accomplishes this. The call from_server.race(to_server) returns a new future that polls both from_server and to_server and returns Poll::Ready(v) as soon as either of them is ready. Both futures must have the same output type: the final value is that of whichever future finished first. The uncompleted future is dropped.
The race method, along with many other handy utilities, is defined on the async_std::prelude::FutureExt trait, which async_std::prelude makes visible to us.
At this point, the only part of the client’s code that we haven’t shown is the parse_command function. That’s pretty straightforward text-handling code, so we won’t show its definition here. See the complete code in the Git repository for details.
The Server’s Main Function
Here are the entire contents of the main file for the server, src/bin/server/main.rs:
useasync_std::prelude::*;useasync_chat::utils::ChatResult;usestd::sync::Arc;modconnection;modgroup;modgroup_table;useconnection::serve;fnmain()->ChatResult<()>{letaddress=std::env::args().nth(1).expect("Usage: server ADDRESS");letchat_group_table=Arc::new(group_table::GroupTable::new());async_std::task::block_on(async{// This code was shown in the chapter introduction.useasync_std::{net,task};letlistener=net::TcpListener::bind(address).await?;letmutnew_connections=listener.incoming();whileletSome(socket_result)=new_connections.next().await{letsocket=socket_result?;letgroups=chat_group_table.clone();task::spawn(async{log_error(serve(socket,groups).await);});}Ok(())})}fnlog_error(result:ChatResult<()>){ifletErr(error)=result{eprintln!("Error: {}",error);}}
The server’s main function resembles the client’s: it does a little bit of setup and then calls block_on to run an async block that does the real work. To handle incoming connections from clients, it creates a TcpListener socket, whose incoming method returns a stream of std::io::Result<TcpStream> values.
For each incoming connection, we spawn an asynchronous task running the connection::serve function. Each task also receives a reference to a GroupTable value representing our server’s current list of chat groups, shared by all the connections via an Arc reference-counted pointer.
If connection::serve returns an error, we log a message to the standard error output and let the task exit. Other connections continue to run as usual.
Handling Chat Connections: Async Mutexes
Here’s the server’s workhorse: the serve function from the connection module in src/bin/server/connection.rs:
useasync_chat::{FromClient,FromServer};useasync_chat::utils::{self,ChatResult};useasync_std::prelude::*;useasync_std::io::BufReader;useasync_std::net::TcpStream;useasync_std::sync::Arc;usecrate::group_table::GroupTable;pubasyncfnserve(socket:TcpStream,groups:Arc<GroupTable>)->ChatResult<()>{letoutbound=Arc::new(Outbound::new(socket.clone()));letbuffered=BufReader::new(socket);letmutfrom_client=utils::receive_as_json(buffered);whileletSome(request_result)=from_client.next().await{letrequest=request_result?;letresult=matchrequest{FromClient::Join{group_name}=>{letgroup=groups.get_or_create(group_name);group.join(outbound.clone());Ok(())}FromClient::Post{group_name,message}=>{matchgroups.get(&group_name){Some(group)=>{group.post(message);Ok(())}None=>{Err(format!("Group '{}' does not exist",group_name))}}}};ifletErr(message)=result{letreport=FromServer::Error(message);outbound.send(report).await?;}}Ok(())}
This is almost a mirror image of the client’s handle_replies function: the bulk of the code is a loop handling an incoming stream of FromClient values, built from a buffered TCP stream with receive_as_json. If an error occurs, we generate a FromServer::Error packet to convey the bad news back to the client.
In addition to error messages, clients would also like to receive messages from the chat groups they’ve joined, so the connection to the client needs to be shared with each group. We could simply give everyone a clone of the TcpStream, but if two of these sources try to write a packet to the socket at the same time, their output might be interleaved, and the client would end up receiving garbled JSON. We need to arrange safe concurrent access to the connection.
This is managed with the Outbound type, defined in src/bin/server/connection.rs as follows:
useasync_std::sync::Mutex;pubstructOutbound(Mutex<TcpStream>);implOutbound{pubfnnew(to_client:TcpStream)->Outbound{Outbound(Mutex::new(to_client))}pubasyncfnsend(&self,packet:FromServer)->ChatResult<()>{letmutguard=self.0.lock().await;utils::send_as_json(&mut*guard,&packet).await?;guard.flush().await?;Ok(())}}
When created, an Outbound value takes ownership of a TcpStream and wraps it in a Mutex to ensure that only one task can use it at a time. The serve function wraps each Outbound in an Arc reference-counted pointer so that all the groups the client joins can point to the same shared Outbound instance.
A call to Outbound::send first locks the mutex, returning a guard value that dereferences to the TcpStream inside. We use send_as_json to transmit packet, and then finally we call guard.flush() to ensure it won’t languish half-transmitted in some buffer somewhere. (To our knowledge, TcpStream doesn’t actually buffer data, but the Write trait permits its implementations to do so, so we shouldn’t take any chances.)
The expression &mut *guard lets us work around the fact that Rust doesn’t apply deref coercions to meet trait bounds. Instead, we explicitly dereference the mutex guard and then borrow a mutable reference to the TcpStream it protects, producing the &mut TcpStream that send_as_json requires.
Note that Outbound uses the async_std::sync::Mutex type, not the standard library’s Mutex. There are three reasons for this.
First, the standard library’s Mutex may misbehave if a task is suspended while holding a mutex guard. If the thread that had been running that task picks up another task that tries to lock the same Mutex, trouble ensues: from the Mutex’s point of view, the thread that already owns it is trying to lock it again. The standard Mutex isn’t designed to handle this case, so it panics or deadlocks. (It will never grant the lock inappropriately.) There is work underway to make Rust detect this problem at compile time and issue a warning whenever a std::sync::Mutex guard is live across an await expression. Since Outbound::send needs to hold the lock while it awaits the futures of send_as_json and guard.flush, it must use async_std’s Mutex.
Second, the asynchronous Mutex’s lock method returns a future of a guard, so a task waiting to lock a mutex yields its thread for other tasks to use until the mutex is ready. (If the mutex is already available, the lock future is ready immediately, and the task doesn’t suspend itself at all.) The standard Mutex’s lock method, on the other hand, pins down the entire thread while it waits to acquire the lock. Since the preceding code holds the mutex while it transmits a packet across the network, that might take quite a while.
Finally, the standard Mutex must only be unlocked by the same thread that locked it. To enforce this, the standard mutex’s guard type does not implement Send: it cannot be transmitted to other threads. This means that a future holding such a guard does not itself implement Send, and cannot be passed to spawn to run on a thread pool; it can only be run with block_on or spawn_local. The guard for an async_std Mutex does implement Send so there’s no problem using it in spawned tasks.
The Group Table: Synchronous Mutexes
But the moral of the story is not as simple as, “Always use async_std::sync::Mutex in asynchronous code.” Often there is no need to await anything while holding a mutex, and the lock is not held for long. In such cases, the standard library’s Mutex can be much more efficient. Our chat server’s GroupTable type illustrates this case. Here are the full contents of src/bin/server/group_table.rs:
usecrate::group::Group;usestd::collections::HashMap;usestd::sync::{Arc,Mutex};pubstructGroupTable(Mutex<HashMap<Arc<String>,Arc<Group>>>);implGroupTable{pubfnnew()->GroupTable{GroupTable(Mutex::new(HashMap::new()))}pubfnget(&self,name:&String)->Option<Arc<Group>>{self.0.lock().unwrap().get(name).cloned()}pubfnget_or_create(&self,name:Arc<String>)->Arc<Group>{self.0.lock().unwrap().entry(name.clone()).or_insert_with(||Arc::new(Group::new(name))).clone()}}
A GroupTable is simply a mutex-protected hash table, mapping chat group names to actual groups, both managed using reference-counted pointers. The get and get_or_create methods lock the mutex, perform a few hash table operations, perhaps some allocations, and return.
In GroupTable, we use a plain old std::sync::Mutex. There is no asynchronous code in this module at all, so there are no awaits to avoid. Indeed, if we wanted to use async_std::sync::Mutex here, we would need to make get and get_or_create into asynchronous functions, which introduces the overhead of future creation, suspensions, and resumptions for little benefit: the mutex is locked only for some hash operations and perhaps a few allocations.
If our chat server found itself with millions of users, and the GroupTable mutex did become a bottleneck, making it asynchronous wouldn’t address that problem. It would probably be better to use some sort of collection type specialized for concurrent access instead of HashMap. For example, the dashmap crate provides such a type.
Chat Groups: tokio’s Broadcast Channels
In our server, the group::Group type represents a chat group. This type only needs to support the two methods that connection::serve calls: join, to add a new member, and post, to post a message. Each message posted needs to be distributed to all the members.
This is where we address the challenge mentioned earlier of backpressure. There are several needs in tension with each other:
-
If one member can’t keep up with the messages being posted to the group—if they have a slow network connection, for example—other members in the group should not be affected.
-
Even if a member falls behind, there should be means for them to rejoin the conversation and continue to participate somehow.
-
Memory spent buffering messages should not grow without bound.
Because these challenges are common when implementing many-to-many communication patterns, the tokio crate provides a broadcast channel type that implements one reasonable set of tradeoffs. A tokio broadcast channel is a queue of values (in our case, chat messages) that allows any number of different threads or tasks to send and receive values. It’s called a “broadcast” channel because every consumer gets its own copy of each value sent. (The value type must implement Clone.)
Normally, a broadcast channel retains a message in the queue until every consumer has gotten their copy. But if the length of the queue would exceed the channel’s maximum capacity, specified when it is created, the oldest messages get dropped. Any consumers who couldn’t keep up get an error the next time they try to get their next message, and the channel catches them up to the oldest message still available.
For example, Figure 20-4 shows a broadcast channel with a maximum capacity of 16 values.
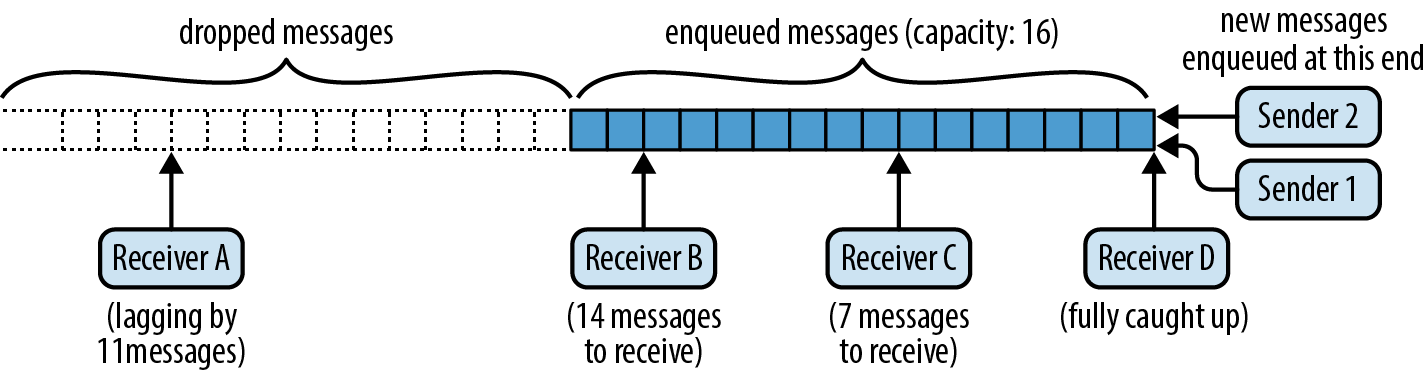
Figure 20-4. A tokio broadcast channel
There are two senders enqueuing messages and four receivers dequeueing them—or more precisely, copying messages out of the queue. Receiver B has 14 messages still to receive, receiver C has 7, and receiver D is fully caught up. Receiver A has fallen behind, and 11 messages were dropped before it could see them. Its next attempt to receive a message will fail, returning an error indicating the situation, and it will be caught up to the current end of the queue.
Our chat server represents each chat group as a broadcast channel carrying Arc<String> values: posting a message to the group broadcasts it to all current members. Here’s the definition of the group::Group type, defined in src/bin/server/group.rs:
useasync_std::task;usecrate::connection::Outbound;usestd::sync::Arc;usetokio::sync::broadcast;pubstructGroup{name:Arc<String>,sender:broadcast::Sender<Arc<String>>}implGroup{pubfnnew(name:Arc<String>)->Group{let(sender,_receiver)=broadcast::channel(1000);Group{name,sender}}pubfnjoin(&self,outbound:Arc<Outbound>){letreceiver=self.sender.subscribe();task::spawn(handle_subscriber(self.name.clone(),receiver,outbound));}pubfnpost(&self,message:Arc<String>){// This only returns an error when there are no subscribers. A// connection's outgoing side can exit, dropping its subscription,// slightly before its incoming side, which may end up trying to send a// message to an empty group.let_ignored=self.sender.send(message);}}
A Group struct holds the name of the chat group, together with a broadcast::Sender representing the sending end of the group’s broadcast channel. The Group::new method calls broadcast::channel to create a broadcast channel with a maximum capacity of 1,000 messages. The channel function returns both a sender and a receiver, but we have no need for the receiver at this point, since the group doesn’t have any members yet.
To add a new member to the group, the Group::join method calls the sender’s subscribe method to create a new receiver for the channel. Then it spawns a new asynchronous task to monitor that receiver for messages and write them back to the client, in the handle_subscribe function.
With those details in hand, the Group::post method is straightforward: it simply sends the message to the broadcast channel. Since the values carried by the channel are Arc<String> values, giving each receiver its own copy of a message just increases the message’s reference count, without any copies or heap allocation. Once all the subscribers have transmitted the message, the reference count drops to zero, and the message is freed.
Here’s the definition of handle_subscriber:
useasync_chat::FromServer;usetokio::sync::broadcast::error::RecvError;asyncfnhandle_subscriber(group_name:Arc<String>,mutreceiver:broadcast::Receiver<Arc<String>>,outbound:Arc<Outbound>){loop{letpacket=matchreceiver.recv().await{Ok(message)=>FromServer::Message{group_name:group_name.clone(),message:message.clone(),},Err(RecvError::Lagged(n))=>FromServer::Error(format!("Dropped {} messages from {}.",n,group_name)),Err(RecvError::Closed)=>break,};ifoutbound.send(packet).await.is_err(){break;}}}
Although the details are different, the form of this function is familiar: it’s a loop that receives messages from the broadcast channel and transmits them back to the client via the shared Outbound value. If the loop can’t keep up with the broadcast channel, it receives a Lagged error, which it dutifully reports to the client.
If sending a packet back to the client fails completely, perhaps because the connection has closed, handle_subscriber exits its loop and returns, causing the asynchronous task to exit. This drops the broadcast channel’s Receiver, unsubscribing it from the channel. This way, when a connection is dropped, each of its group memberships is cleaned up the next time the group tries to send it a message.
Our chat groups never close down, since we never remove a group from the group table, but just for completeness, handle_subscriber is ready to handle a Closed error by exiting the task.
Note that we’re creating a new asynchronous task for every group membership of every client. This is feasible because asynchronous tasks use so much less memory than threads and because switching from one asynchronous task to another within a process is quite efficient.
This, then, is the complete code for the chat server. It is a bit spartan, and there are many more valuable features in the async_std, tokio, and futures crates than we can cover in this book, but ideally this extended example manages to illustrate how some of the features of asynchronous ecosystem work together: asynchronous tasks, streams, the asynchronous I/O traits, channels, and mutexes of both flavors.
Primitive Futures and Executors: When Is a Future Worth Polling Again?
The chat server shows how we can write code using asynchronous primitives like TcpListener and the broadcast channel, and use executors like block_on and spawn to drive their execution. Now we can take a look at how these things are implemented. The key question is, when a future returns Poll::Pending, how does it coordinate with the executor to poll it again at the right time?
Think about what happens when we run code like this, from the chat client’s main function:
task::block_on(async{letsocket=net::TcpStream::connect(address).await?;...})
The first time block_on polls the async block’s future, the network connection is almost certainly not ready immediately, so block_on goes to sleep. But when should it wake up? Somehow, once the network connection is ready, TcpStream needs to tell block_on that it should try polling the async block’s future again, because it knows that this time, the await will complete, and execution of the async block can make progress.
When an executor like block_on polls a future, it must pass in a callback called a waker. If the future is not ready yet, the rules of the Future trait say that it must return Poll::Pending for now, and arrange for the waker to be invoked later, if and when the future is worth polling again.
So a handwritten implementation of Future often looks something like this:
usestd::task::Waker;structMyPrimitiveFuture{...waker:Option<Waker>,}implFutureforMyPrimitiveFuture{typeOutput=...;fnpoll(mutself:Pin<&mutSelf>,cx:&mutContext<'_>)->Poll<...>{...if...futureisready...{returnPoll::Ready(final_value);}// Save the waker for later.self.waker=Some(cx.waker().clone());Poll::Pending}}
In other words, if the future’s value is ready, return it. Otherwise, stash a clone of the Context’s waker somewhere, and return Poll::Pending.
When the future is worth polling again, the future must notify the last executor that polled it by invoking its waker:
// If we have a waker, invoke it, and clear `self.waker`.ifletSome(waker)=self.waker.take(){waker.wake();}
Ideally, the executor and the future take turns polling and waking: the executor polls the future and goes to sleep, then the future invokes the waker, so the executor wakes up and polls the future again.
Futures of async functions and blocks don’t deal with wakers themselves. They simply pass along the context they’re given to the subfutures they await, delegating to them the obligation to save and invoke wakers. In our chat client, the first poll of the async block’s future just passes the context along when it awaits TcpStream::connect’s future. Subsequent polls similarly pass their context through to whatever future the block awaits next.
TcpStream::connect’s future handles being polled as shown in the preceding example: it hands the waker over to a helper thread that waits for the connection to be ready and then invokes it.
Waker implements Clone and Send, so a future can always make its own copy of the waker and send it to other threads as needed. The Waker::wake method consumes the waker. There is also a wake_by_ref method that does not, but some executors can implement the consuming version a bit more efficiently. (The difference is at most a clone.)
It’s harmless for an executor to overpoll a future, just inefficient. Futures, however, should be careful to invoke a waker only when polling would make actual progress: a cycle of spurious wakeups and polls can prevent an executor from ever sleeping at all, wasting power and leaving the processor less responsive to other tasks.
Now that we have shown how executors and primitive futures communicate, we’ll implement a primitive future ourselves and then walk through an implementation of the block_on executor.
Invoking Wakers: spawn_blocking
Earlier in the chapter, we described the spawn_blocking function, which starts a given closure running on another thread and returns a future of its return value. We now have all the pieces we need to implement spawn_blocking ourselves. For simplicity, our version creates a fresh thread for each closure, rather than using a thread pool, as async_std’s version does.
Although spawn_blocking returns a future, we’re not going to write it as an async fn. Rather, it’ll be an ordinary, synchronous function that returns a struct, SpawnBlocking, on which we’ll implement Future ourselves.
The signature of our spawn_blocking is as follows:
pubfnspawn_blocking<T,F>(closure:F)->SpawnBlocking<T>whereF:FnOnce()->T,F:Send+'static,T:Send+'static,
Since we need to send the closure to another thread and bring the return value back, both the closure F and its return value T must implement Send. And since we don’t have any idea how long the thread will run, they must both be 'static as well. These are the same bounds that std::thread::spawn itself imposes.
SpawnBlocking<T> is a future of the closure’s return value. Here is its definition:
usestd::sync::{Arc,Mutex};usestd::task::Waker;pubstructSpawnBlocking<T>(Arc<Mutex<Shared<T>>>);structShared<T>{value:Option<T>,waker:Option<Waker>,}
The Shared struct must serve as a rendezvous between the future and the thread running the closure, so it is owned by an Arc and protected with a Mutex. (A synchronous mutex is fine here.) Polling the future checks whether value is present and saves the waker in waker if not. The thread that runs the closure saves its return value in value and then invokes waker, if present.
Here’s the full definition of spawn_blocking:
pubfnspawn_blocking<T,F>(closure:F)->SpawnBlocking<T>whereF:FnOnce()->T,F:Send+'static,T:Send+'static,{letinner=Arc::new(Mutex::new(Shared{value:None,waker:None,}));std::thread::spawn({letinner=inner.clone();move||{letvalue=closure();letmaybe_waker={letmutguard=inner.lock().unwrap();guard.value=Some(value);guard.waker.take()};ifletSome(waker)=maybe_waker{waker.wake();}}});SpawnBlocking(inner)}
After creating the Shared value, this spawns a thread to run the closure, store the result in the Shared’s value field, and invoke the waker, if any.
We can implement Future for SpawnBlocking as follows:
usestd::future::Future;usestd::pin::Pin;usestd::task::{Context,Poll};impl<T:Send>FutureforSpawnBlocking<T>{typeOutput=T;fnpoll(self:Pin<&mutSelf>,cx:&mutContext<'_>)->Poll<T>{letmutguard=self.0.lock().unwrap();ifletSome(value)=guard.value.take(){returnPoll::Ready(value);}guard.waker=Some(cx.waker().clone());Poll::Pending}}
Polling a SpawnBlocking checks if the closure’s value is ready, taking ownership and returning it if so. Otherwise, the future is still pending, so it saves a clone of the context’s waker in the future’s waker field.
Once a Future has returned Poll::Ready, you’re not supposed to poll it again. The usual ways of consuming futures, like await and block_on, all respect this rule. If a SpawnBlocking future is overpolled, nothing especially terrible happens, but it doesn’t go to any effort to handle that case, either. This is typical for handwritten futures.
Implementing block_on
In addition to being able to implement primitive futures, we also have all the pieces we need to build a simple executor. In this section, we’ll write our own version of block_on. It will be quite a bit simpler than async_std’s version; for example, it won’t support spawn_local, task-local variables, or nested invocations (calling block_on from asynchronous code). But it is sufficient to run our chat client and server.
Here’s the code:
usewaker_fn::waker_fn;// Cargo.toml: waker-fn = "1.1"usefutures_lite::pin;// Cargo.toml: futures-lite = "1.11"usecrossbeam::sync::Parker;// Cargo.toml: crossbeam = "0.8"usestd::future::Future;usestd::task::{Context,Poll};fnblock_on<F:Future>(future:F)->F::Output{letparker=Parker::new();letunparker=parker.unparker().clone();letwaker=waker_fn(move||unparker.unpark());letmutcontext=Context::from_waker(&waker);pin!(future);loop{matchfuture.as_mut().poll(&mutcontext){Poll::Ready(value)=>returnvalue,Poll::Pending=>parker.park(),}}}
This is pretty short, but there’s a lot going on, so let’s take it one piece at a time.
letparker=Parker::new();letunparker=parker.unparker().clone();
The crossbeam crate’s Parker type is a simple blocking primitive: calling parker.park() blocks the thread until someone else calls .unpark() on the corresponding Unparker, which you obtain beforehand by calling parker.unparker(). If you unpark a thread that isn’t parked yet, its next call to park returns immediately, without blocking. Our block_on will use the Parker to wait whenever the future isn’t ready, and the waker we pass to futures will unpark it.
letwaker=waker_fn(move||unparker.unpark());
The waker_fn function, from the crate of the same name, creates a Waker from a given closure. Here, we make a Waker that, when invoked, calls the closure move || unparker.unpark(). You can create wakers using just the standard library, but waker_fn is a bit more convenient.
pin!(future);
Given a variable holding a future of type F, the pin! macro takes ownership of the future and declares a new variable of the same name whose type is Pin<&mut F> and that borrows the future. This gives us the Pin<&mut Self> required by the poll method. For reasons we’ll explain in the next section, futures of asynchronous functions and blocks must be referenced via a Pin before they can be polled.
loop{matchfuture.as_mut().poll(&mutcontext){Poll::Ready(value)=>returnvalue,Poll::Pending=>parker.park(),}}
Finally, the polling loop is quite simple. Passing a context carrying our waker, we poll the future until it returns Poll::Ready. If it returns Poll::Pending, we park the thread, which blocks until waker is invoked. Then we try again.
The as_mut call lets us poll future without giving up ownership; we’ll explain this more in the next section.
Pinning
Although asynchronous functions and blocks are essential for writing clear asynchronous code, handling their futures requires a bit of care. The Pin type helps Rust ensure they’re used safely.
In this section, we’ll show why futures of asynchronous function calls and blocks can’t be handled as freely as ordinary Rust values. Then we’ll show how Pin serves as a “seal of approval” on pointers that can be counted on to manage such futures safely. Finally, we’ll show a few ways to work with Pin values.
The Two Life Stages of a Future
Consider this simple asynchronous function:
useasync_std::io::prelude::*;useasync_std::{io,net};asyncfnfetch_string(address:&str)->io::Result<String>{❶letmutsocket=net::TcpStream::connect(address).await❷?;letmutbuf=String::new();socket.read_to_string(&mutbuf).await❸?;Ok(buf)}
This opens a TCP connection to the given address and returns, as a String, whatever the server there wants to send. The points labeled ❶, ❷, and ❸ are the resumption points, the points in the asynchronous function’s code at which execution may be suspended.
Suppose you call it, without awaiting, like so:
letresponse=fetch_string("localhost:6502");
Now response is a future ready to begin execution at the start of fetch_string, with the given argument. In memory, the future looks something like Figure 20-5.
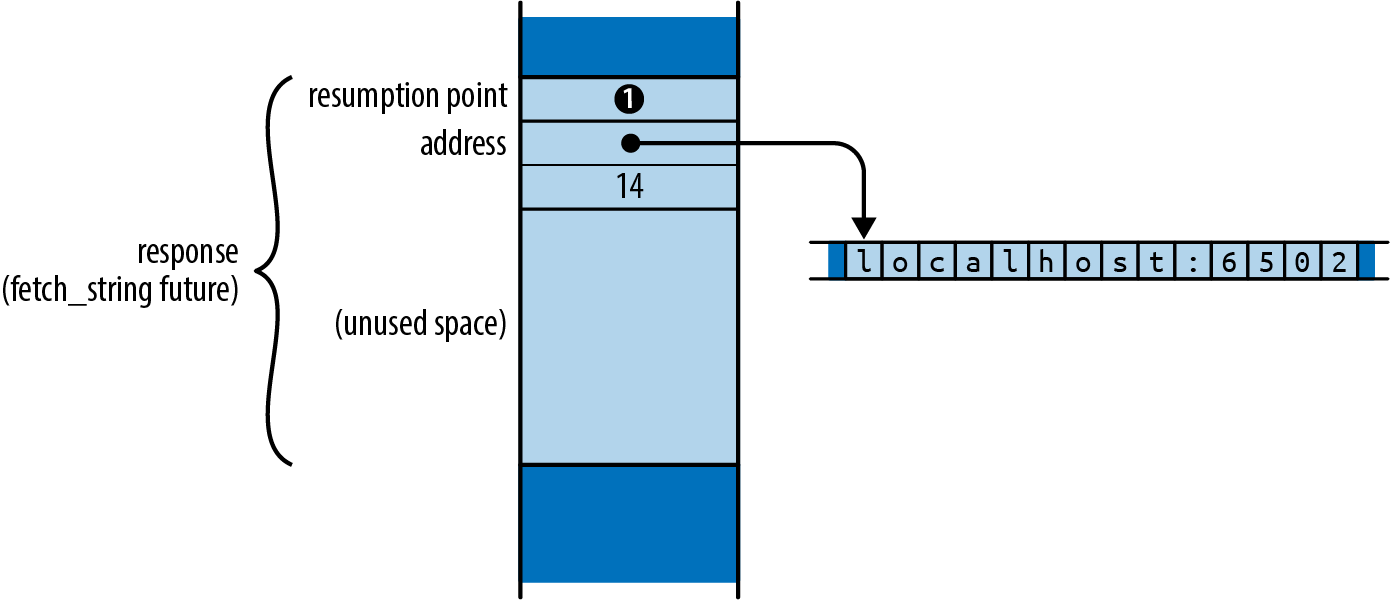
Figure 20-5. The future constructed for a call to fetch_string
Since we just created this future, it says that execution should begin at resumption point ❶, at the top of the function body. In this state, the only values a future needs to proceed are the function arguments.
Now suppose that you poll response a few times and it reaches this point in the function’s body:
socket.read_to_string(&mutbuf).await❸?;
Suppose further that the result of read_to_string isn’t ready, so the poll returns Poll::Pending. At this point, the future looks like Figure 20-6.
A future must always hold all the information needed to resume execution the next time it is polled. In this case that is:
-
Resumption point ❸, saying that execution should resume in the
awaitpollingread_to_string’s future. -
The variables that are alive at that resumption point:
socketandbuf. The value ofaddressis no longer present in the future, since the function no longer needs it. -
The
read_to_stringsubfuture, which theawaitexpression is in the midst of polling.
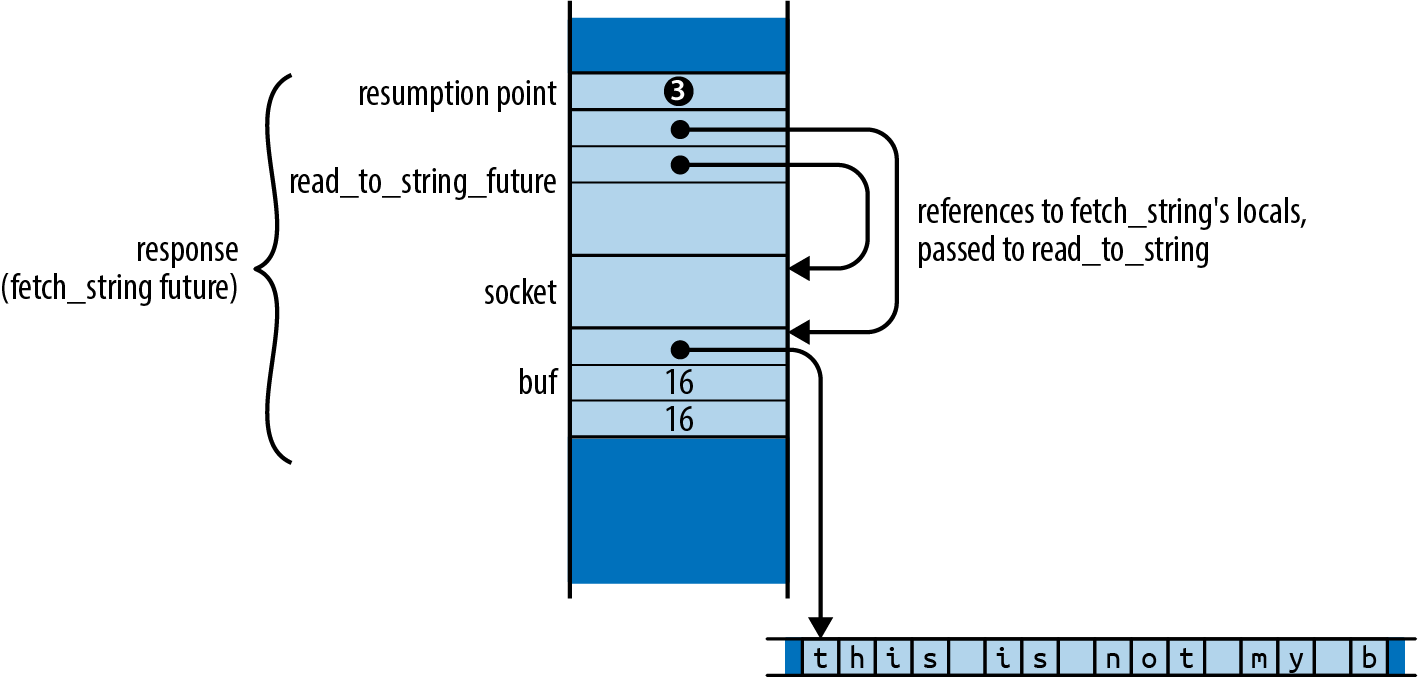
Figure 20-6. The same future, in the midst of awaiting read_to_string
Note that the call to read_to_string has borrowed references to socket and buf. In a synchronous function, all local variables live on the stack, but in an asynchronous function, local variables that are alive across an await must be located in the future, so they’ll be available when it is polled again. Borrowing a reference to such a variable borrows a part of the future.
However, Rust requires that values not be moved while they are borrowed. Suppose you were to move this future to a new location:
letnew_variable=response;
Rust has no means to find all the active references and adjust them accordingly. Instead of pointing to socket and buf at their new locations, the references continue to point at their old locations in the now-uninitialized response. They have become dangling pointers, as shown in Figure 20-7.
Preventing borrowed values from being moved is generally the borrow checker’s responsibility. The borrow checker treats variables as the roots of ownership trees, but unlike variables stored on the stack, variables stored in futures get moved if the future itself moves. This means the borrows of socket and buf affect not just what fetch_string can do with its own variables, but what its caller can safely do with response, the future that holds them. Futures of async functions are a blind spot for the borrow checker, which Rust must cover somehow if it wants to keep its memory safety promises.
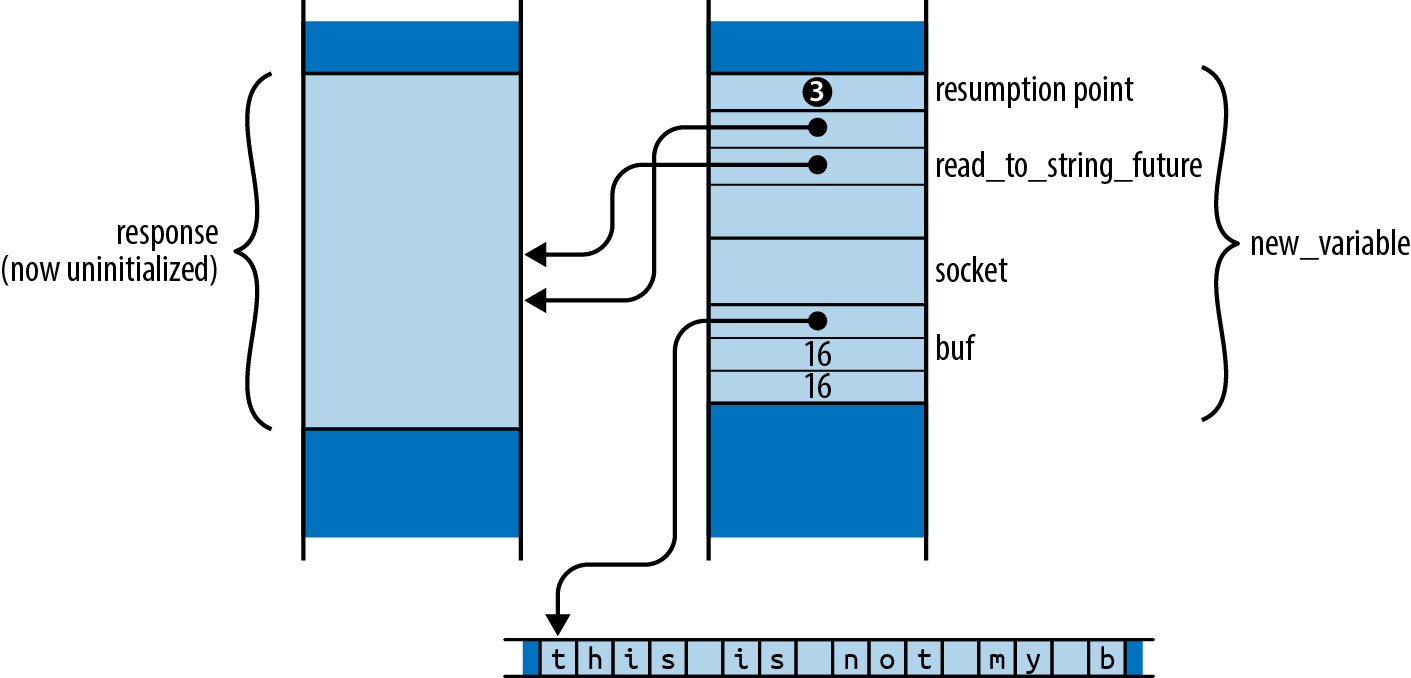
Figure 20-7. fetch_string’s future, moved while borrowed (Rust prevents this)
Rust’s solution to this problem rests on the insight that futures are always safe to move when they are first created, and only become unsafe to move when they are polled. A future that has just been created by calling an asynchronous function simply holds a resumption point and the argument values. These are only in scope for the asynchronous function’s body, which has not yet begun execution. Only polling a future can borrow its contents.
From this, we can see that every future has two life stages:
-
The first stage begins when the future is created. Because the function’s body hasn’t begun execution, no part of it could possibly be borrowed yet. At this point, it’s as safe to move as any other Rust value.
-
The second stage begins the first time the future is polled. Once the function’s body has begun execution, it could borrow references to variables stored in the future and then await, leaving that part of the future borrowed. Starting after its first poll, we must assume the future may not be safe to move.
The flexibility of the first life stage is what lets us pass futures to block_on and spawn and call adapter methods like race and fuse, all of which take futures by value. In fact, even the asynchronous function call that created the future in the first place had to return it to the caller; that was a move as well.
To enter its second life stage, the future must be polled. The poll method requires the future be passed as a Pin<&mut Self> value. Pin is a wrapper for pointer types (like &mut Self) that restricts how the pointers can be used, ensuring that their referents (like Self) cannot ever be moved again. So you must produce a Pin-wrapped pointer to the future before you can poll it.
This, then, is Rust’s strategy for keeping futures safe: a future can’t become dangerous to move until it’s polled; you can’t poll a future until you’ve constructed a Pin-wrapped pointer to it; and once you’ve done that, the future can’t be moved.
“A value you can’t move” sounds impossible: moves are everywhere in Rust. We’ll explain exactly how Pin protects futures in the next section.
Although this section has discussed asynchronous functions, everything here applies to asynchronous blocks as well. A freshly created future of an asynchronous block simply captures the variables it will use from the surrounding code, like a closure. Only polling the future can create references to its contents, rendering it unsafe to move.
Keep in mind that this move fragility is limited to futures of asynchronous functions and blocks, with their special compiler-generated Future implementations. If you implement Future by hand for your own types, as we did for our SpawnBlocking type in “Invoking Wakers: spawn_blocking”, such futures are perfectly safe to move both before and after they’ve been polled. In any handwritten poll implementation, the borrow checker ensures that whatever references you had borrowed to parts of self are gone by the time poll returns. It is only because asynchronous functions and blocks have the power to suspend execution in the midst of a function call, with borrows in progress, that we must handle their futures with care.
Pinned Pointers
The Pin type is a wrapper for pointers to futures that restricts how the pointers may be used to make sure that futures can’t be moved once they’ve been polled. These restrictions can be lifted for futures that don’t mind being moved, but they are essential to safely polling futures of asynchronous functions and blocks.
By pointer, we mean any type that implements Deref, and possibly DerefMut. A Pin wrapped around a pointer is called a pinned pointer. Pin<&mut T> and Pin<Box<T>> are typical.
The definition of Pin in the standard library is simple:
pubstructPin<P>{pointer:P,}
Note that the pointer field is not pub. This means that the only way to construct or use a Pin is through the carefully chosen methods the type provides.
Given a future of an asynchronous function or block, there are only a few ways to get a pinned pointer to it:
-
The
pin!macro, from thefutures-litecrate, shadows a variable of typeTwith a new one of typePin<&mut T>. The new variable points to the original’s value, which has been moved to an anonymous temporary location on the stack. When the variable goes out of scope, the value is dropped. We usedpin!in ourblock_onimplementation to pin the future we wanted to poll. -
The standard library’s
Box::pinconstructor takes ownership of a value of any typeT, moves it into the heap, and returns aPin<Box<T>>. -
Pin<Box<T>>implementsFrom<Box<T>>, soPin::from(boxed)takes ownership ofboxedand gives you back a pinned box pointing at the sameTon the heap.
Every way to obtain a pinned pointer to these futures entails giving up ownership of the future, and there is no way to get it back out. The pinned pointer itself can be moved in any way you please, of course, but moving a pointer doesn’t move its referent. So possession of a pinned pointer to a future serves as proof that you have permanently given up the ability to move that future. This is all we need to know that it can be polled safely.
Once you’ve pinned a future, if you’d like to poll it, all Pin<pointer to T> types have an as_mut method that dereferences the pointer and returns the Pin<&mut T> that poll requires.
The as_mut method can also help you poll a future without giving up ownership. Our block_on implementation used it in this role:
pin!(future);loop{matchfuture.as_mut().poll(&mutcontext){Poll::Ready(value)=>returnvalue,Poll::Pending=>parker.park(),}}
Here, the pin! macro has redeclared future as a Pin<&mut F>, so we could just pass that to poll. But mutable references are not Copy, so Pin<&mut F> cannot be Copy either, meaning that calling future.poll() directly would take ownership of future, leaving the next iteration of the loop with an uninitialized variable. To avoid this, we call future.as_mut() to reborrow a fresh Pin<&mut F> for each loop iteration.
There is no way to get a &mut reference to a pinned future: if you could, you could use std::mem::replace or std::mem::swap to move it out and put a different future in its place.
The reason we don’t have to worry about pinning futures in ordinary asynchronous code is that the most common ways to obtain a future’s value—awaiting it or passing to an executor—all take ownership of the future and manage the pinning internally. For example, our block_on implementation takes ownership of the future and uses the pin! macro to produce the Pin<&mut F> needed to poll. An await expression also takes ownership of the future and uses an approach similar to the pin! macro internally.
The Unpin Trait
However, not all futures require this kind of careful handling. For any handwritten implementation of Future for an ordinary type, like our SpawnBlocking type mentioned earlier, the restrictions on constructing and using pinned pointers are unnecessary.
Such durable types implement the Unpin marker trait:
traitUnpin{}
Almost all types in Rust automatically implement Unpin, using special support in the compiler. Asynchronous function and block futures are the exceptions to this rule.
For Unpin types, Pin imposes no restrictions whatsoever. You can make a pinned pointer from an ordinary pointer with Pin::new and get the pointer back out with Pin::into_inner. The Pin itself passes along the pointer’s own Deref and DerefMut implementations.
For example, String implements Unpin, so we can write:
letmutstring="Pinned?".to_string();letmutpinned:Pin<&mutString>=Pin::new(&mutstring);pinned.push_str(" Not");Pin::into_inner(pinned).push_str(" so much.");letnew_home=string;assert_eq!(new_home,"Pinned? Not so much.");
Even after making a Pin<&mut String>, we have full mutable access to the string and can move it to a new variable once the Pin has been consumed by into_inner and the mutable reference is gone. So for types that are Unpin—which is almost all of them—Pin is a boring wrapper around pointers to that type.
This means that when you implement Future for your own Unpin types, your poll implementation can treat self as if it were &mut Self, not Pin<&mut Self>. Pinning becomes something you can mostly ignore.
It may be surprising to learn that Pin<&mut F> and Pin<Box<F>> implement Unpin, even if F does not. This doesn’t read well—how can a Pin be Unpin?—but if you think carefully about what each term means, it does make sense. Even if F is not safe to move once it has been polled, a pointer to it is always safe to move, polled or not. Only the pointer moves; its fragile referent says put.
This is useful to know when you would like to pass the future of an asynchronous function or block to a function that only accepts Unpin futures. (Such functions are rare in async_std, but less so elsewhere in the async ecosystem.) Pin<Box<F>> is Unpin even if F is not, so applying Box::pin to an asynchronous function or block future gives you a future you can use anywhere, at the cost of a heap allocation.
There are various unsafe methods for working with Pin that let you do whatever you like with the pointer and its target, even for target types that are not Unpin. But as explained in Chapter 22, Rust cannot check that these methods are being used correctly; you become responsible for ensuring the safety of the code that uses them.
When Is Asynchronous Code Helpful?
Asynchronous code is trickier to write than multithreaded code. You have to use the right I/O and synchronization primitives, break up long-running computations by hand or spin them off on other threads, and manage other details like pinning that don’t arise in threaded code. So what specific advantages does asynchronous code offer?
Two claims you’ll often hear don’t stand up to careful inspection:
-
“Async code is great for I/O.” This is not quite correct. If your application is spending its time waiting for I/O, making it async will not make that I/O run faster. There is nothing about the asynchronous I/O interfaces generally used today that makes them more efficient than their synchronous counterparts. The operating system has the same work to do either way. (In fact, an asynchronous I/O operation that isn’t ready must be tried again later, so it takes two system calls to complete instead of one.)
-
“Async code is easier to write than multithreaded code.” In languages like JavaScript and Python, this may well be true. In those languages, programmers use async/await as well-behaved form of concurrency: there’s a single thread of execution, and interruptions only occur at
awaitexpressions, so there’s often no need for a mutex to keep data consistent: just don’t await while you’re in the midst of using it! It’s much easier to understand your code when task switches occur only with your explicit permission.But this argument doesn’t carry over to Rust, where threads aren’t nearly as troublesome. Once your program compiles, it is free of data races. Nondeterministic behavior is confined to synchronization features like mutexes, channels, atomics, and so on, which were designed to cope with it. So asynchronous code has no unique advantage at helping you see when other threads might impact you; that’s clear in all safe Rust code.
And of course, Rust’s asynchronous support really shines when used in combination with threads. It would be a pity to give that up.
So, what are the real advantages of asynchronous code?
-
Asynchronous tasks can use less memory. On Linux, a thread’s memory use starts at 20 KiB, counting both user and kernel space.2 Futures can be much smaller: our chat server’s futures are a few hundred bytes in size and have been getting smaller as the Rust compiler improves.
-
Asynchronous tasks are faster to create. On Linux, creating a thread takes around 15 µs. Spawning an asynchronous task takes around 300 ns, about one-fiftieth the time.
-
Context switches are faster between asynchronous tasks than between operating system threads, 0.2 µs versus 1.7 µs on Linux.3 However, these are best-case numbers for each: if the switch is due to I/O readiness, both costs rise to 1.7 µs. Whether the switch is between threads or tasks on different processor cores also makes a big difference: communication between cores is very slow.
This gives us a hint as to what sorts of problems asynchronous code can solve. For example, an asynchronous server might use less memory per task and thus be able to handle more simultaneous connections. (This is probably where asynchronous code gets its reputation for being “good for I/O.”) Or, if your design is naturally organized as many independent tasks communicating with each other, then low per-task costs, short creation times, and quick context switches are all important advantages. This is why chat servers are the classic example for asynchronous programming, but multi-player games and network routers would probably be good uses too.
In other situations, the case for using async is less clear. If your program has a pool of threads doing heavy computations or sitting idle waiting for I/O to finish, the advantages listed earlier are probably not a big influence on its performance. You’ll have to optimize your computation, find a faster net connection, or do something else that actually affects the limiting factor.
In practice, every account of implementing high-volume servers that we could find emphasized the importance of measurement, tuning, and a relentless campaign to identify and remove sources of contention between tasks. An asynchronous architecture won’t let you skip any of this work. In fact, while there are plenty of off-the-shelf tools for assessing the behavior of multithreaded programs, Rust asynchronous tasks are invisible to those tools and thus require tooling of their own. (As a wise elder once said, “Now you have two problems.”)
Even if you don’t use asynchronous code now, it’s nice to know that the option is there if you ever have the good fortune to be vastly busier than you are now.
1 If you actually need an HTTP client, consider using any one of the many excellent crates like surf or reqwest that will do the job properly and asynchronously. This client mostly just manages to get HTTPS redirects.
2 This includes kernel memory and counts physical pages allocated for the thread, not virtual, yet-to-be-allocated pages. The numbers are similar on macOS and Windows.
3 Linux context switches used to be in the 0.2 µs range, too, until the kernel was forced to use slower techniques due to processor security flaws.